So, the various problem of button have been solved.
Still the code is not fully working. It seems that it can't really get out of the LED loop.
Here a video of the system now, with the code below:
https://1drv.ms/v/s!AmQCAddskXi4hJ4AZvogie8FmPeOSQ?e=s5oD3e
int var1 = 0;
const unsigned long Count200 = 100;
//full time for the actuator
const unsigned long ActuatorTime = 10000;
unsigned long pastLEDTicks = millis();
//use the Long for checking current Millis
unsigned long currentMillis;
//declare the two rockers
const int buttonPinOpen = A14;
const int buttonPinClose = A15;
//declare the LED states
int ledState = 0;
// include the library keypad & LiquidCrystal:
#include <LiquidCrystal.h>
#include <Keypad.h>
#include <SoftwareSerial.h>
#include <DFRobotDFPlayerMini.h>
//declare the speaker output
SoftwareSerial mySoftwareSerial(10, 11); // RX, TX
DFRobotDFPlayerMini myDFPlayer;
//Define constantn for the keypad
const int ROW_NUM = 4;
const int COLUMN_NUM = 3;
//Matrix for the Keypad
char keys[ROW_NUM][COLUMN_NUM] = {
{'1', '2', '3'},
{'4', '5', '6'},
{'7', '8', '9'},
{'*', '0', '#'}
};
//DEFINE pins for the keypad
byte pin_rows[ROW_NUM] = {9, 8, 7, 6}; //connect to the row pinouts of the keypad
byte pin_column[COLUMN_NUM] = {5, 4, 3}; //connect to the column pinouts of the keypad
Keypad keypad = Keypad( makeKeymap(keys), pin_rows, pin_column, ROW_NUM, COLUMN_NUM );
//DEFINE code for the keypad
const String password = "1234"; // password
String input_password;
//Define matrix for colors
const int LED_1 = 21; //LED row 1
const int LED_2 = 20; //LED row 2
const int LED_3 = 19; //LED row 3
//Declare PIN for the green LEDS
const int LED_4 = 40;
//Declare PIN for the blue LEDS
const int LED_5 = 41;
// Declare pins for the LCD
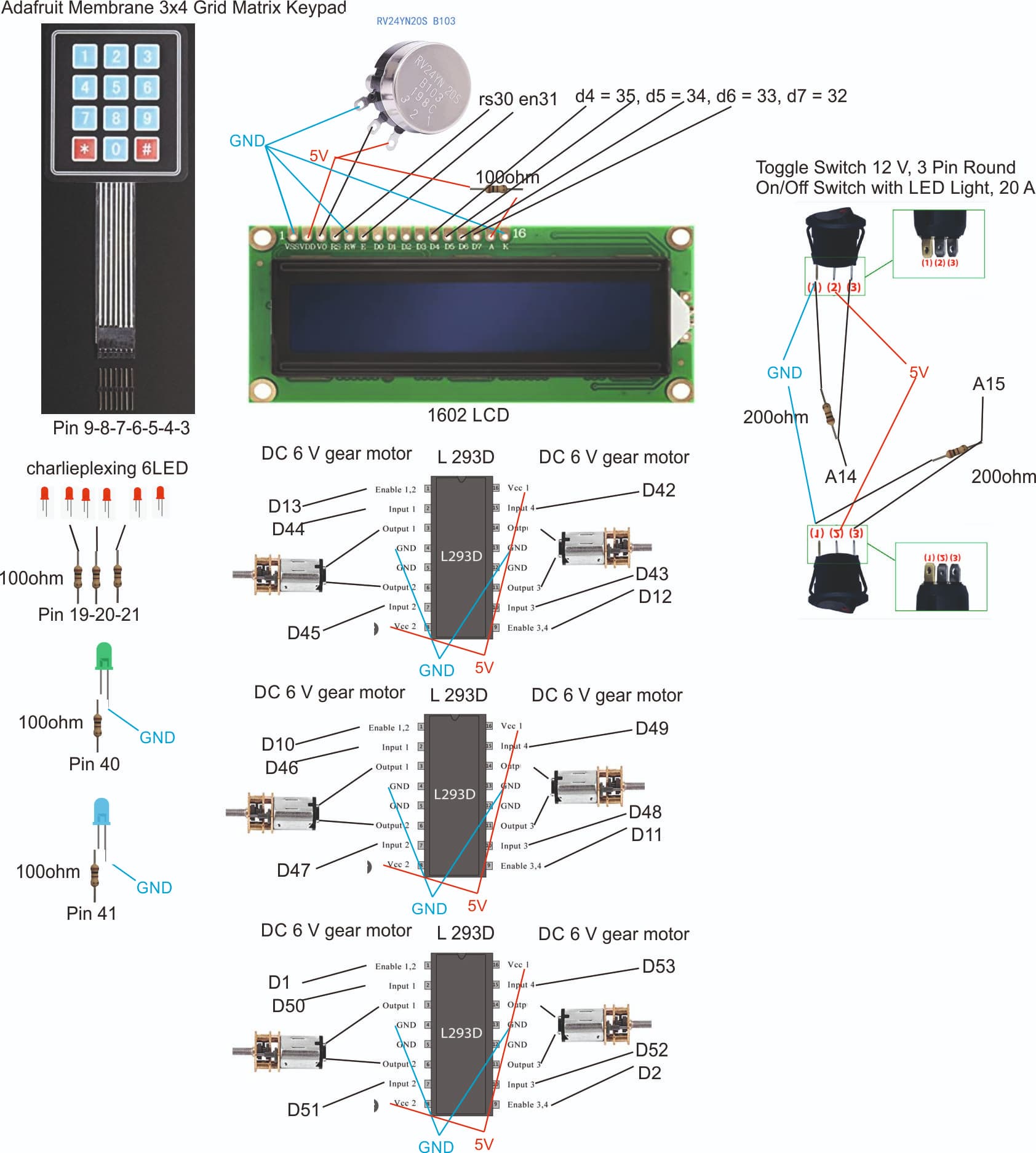
const int rs = 30, en = 31, d4 = 35, d5 = 34, d6 = 33, d7 = 32;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
//declare the LED
#define LED 41
// variables will change:
int buttonmotorStateOpen = 0;
int buttonmotorStateClose = 0;
// Declare constant for actuator A
const int ENA_PIN = 51; // the Arduino pin connected to the ENA pin L298N
const int IN1_PIN = 49; // the Arduino pin connected to the IN1 pin L298N
const int IN2_PIN = 50; // the Arduino pin connected to the IN2 pin L298N
// Declare constant for actuator B
const int ENB_PIN = 53; // the Arduino pin connected to the ENB pin L298N
const int IN3_PIN = 52; // the Arduino pin connected to the IN3 pin L298N
const int IN4_PIN = 48; // the Arduino pin connected to the IN4 pin L298N
void setup() {
Serial.begin(9600);
//introduce code for speakers
mySoftwareSerial.begin(9600);
if (!myDFPlayer.begin(mySoftwareSerial)) { //Use softwareSerial to communicate with mp3.
while(true);
}
myDFPlayer.setTimeOut(500); //Set serial communictaion time out 500ms
myDFPlayer.volume(30); //Set volume value (0~30).
myDFPlayer.EQ(DFPLAYER_EQ_NORMAL);
myDFPlayer.outputDevice(DFPLAYER_DEVICE_SD);
input_password.reserve(32); // maximum input characters is 33, change if needed
pinMode(14, INPUT_PULLUP);
pinMode(15, INPUT_PULLUP);
pinMode(LED, OUTPUT);
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// Initialize motorA
pinMode(ENA_PIN, OUTPUT);
pinMode(IN1_PIN, OUTPUT);
pinMode(IN2_PIN, OUTPUT);
digitalWrite(ENA_PIN, HIGH);
// Initialize motorB
pinMode(ENB_PIN, OUTPUT);
pinMode(IN3_PIN, OUTPUT);
pinMode(IN4_PIN, OUTPUT);
digitalWrite(ENB_PIN, HIGH);
//Initiate programm
StartStatus();
}
void loop()
{
Serial.println(var1);
char key = keypad.getKey();
if (key)
{
//int var1 = 0;
if (digitalRead(A14) == LOW && digitalRead(A15) == LOW)
{
lcd.clear();
lcd.print("Select button");
myDFPlayer.playMp3Folder(1);
input_password = "";
delay(2000);
lcd.clear();
lcd.print("Welcome");
lcd.setCursor(0, 1);
lcd.print("Select button");
lcd.setCursor(0, 0);
}
else if (digitalRead(A14) == HIGH && digitalRead(A15) == HIGH)
{
lcd.clear();
lcd.print("Too many button");
input_password = "";
delay(2000);
lcd.clear();
lcd.print("Welcome");
lcd.setCursor(0, 1);
lcd.print("Select button");
lcd.setCursor(0, 0);
}
else if (digitalRead(A15) == HIGH && digitalRead(A14) == LOW)
{
if(key == '*')
{
input_password = ""; // clear input password
}
else if (key == '#')
{
if (password == input_password)
{
lcd.clear();
lcd.print("CORRECT");
int var1 = 0;
pinMode(LED_5, OUTPUT);
digitalWrite(LED_5, LOW);
pinMode(LED_4, OUTPUT);
digitalWrite(LED_4, HIGH);
delay(200);
digitalWrite(LED_4, LOW);
delay(200);
digitalWrite(LED_4, HIGH);
delay(200);
digitalWrite(LED_4, LOW);
delay(200);
//while loop to have red lights
while (var1 < 1)
{
ClosePiston();
//ledloop();
}
}
else
{
lcd.clear();
lcd.print("INCORRECT");
}
input_password = ""; // clear input password
}
else
{
input_password += key; // append new character to input password string
lcd.clear();
lcd.print(input_password);
}
}
else if (digitalRead(A15) == LOW && digitalRead(A14) == HIGH)
{
if(key == '*')
{
input_password = ""; // clear input password
}
else if (key == '#')
{
if (password == input_password)
{
lcd.clear();
lcd.print("CORRECT");
int var1 = 0;
pinMode(LED_5, OUTPUT);
digitalWrite(LED_5, LOW);
pinMode(LED_4, OUTPUT);
digitalWrite(LED_4, HIGH);
delay(200);
digitalWrite(LED_4, LOW);
delay(200);
digitalWrite(LED_4, HIGH);
delay(200);
digitalWrite(LED_4, LOW);
delay(200);
//while loop to have red lights
while (var1 < 1)
{
//Print and say the message
lcd.clear();
lcd.print("Unlocking door");
myDFPlayer.playMp3Folder(1);
OpenPiston();
//ledloop();
};
}
else
{
lcd.clear();
lcd.print("INCORRECT");
}
input_password = ""; // clear input password
}
else
{
input_password += key; // append new character to input password string
lcd.clear();
lcd.print(input_password);
}
}
}
}
void StartStatus()//This should start the programm
{
//light on the blue
pinMode(LED_5, OUTPUT);
digitalWrite(LED_5, HIGH);
// Print a message to the LCD.
lcd.print("Welcome");
lcd.setCursor(0, 1);
lcd.print("Select button");
lcd.setCursor(0, 0);
myDFPlayer.playMp3Folder(1); //Play sound
}
void ClosePiston()// This function closes the actuators
{
//Print and say the message
lcd.clear();
lcd.print("Locking door");
myDFPlayer.playMp3Folder(1);
//leave the actuator to open for 10sec
currentMillis = millis();
while(millis()-currentMillis < ActuatorTime)
{
ledloop();
digitalWrite(IN1_PIN, LOW);
digitalWrite(IN2_PIN, HIGH);
digitalWrite(IN3_PIN, LOW);
digitalWrite(IN4_PIN, HIGH);
}
//stop the motor
digitalWrite(IN1_PIN, LOW);
digitalWrite(IN2_PIN, LOW);
digitalWrite(IN3_PIN, LOW);
digitalWrite(IN4_PIN, LOW);
//change the LCD
lcd.clear();
lcd.print("All closed");
lcd.setCursor(0, 1);
lcd.print("stop button");
lcd.setCursor(0, 0);
//Update the LEDs
pinMode(LED_1, OUTPUT); //row 1
digitalWrite(LED_1, LOW);
pinMode(LED_2, OUTPUT); //row 2
digitalWrite(LED_2, LOW);
pinMode(LED_3, INPUT); //row 3
digitalWrite(LED_3, LOW);
pinMode(LED_4, OUTPUT);
digitalWrite(LED_4, HIGH);
//add some delay
pinMode(LED_4, OUTPUT);
digitalWrite(LED_4, LOW);
lcd.clear();
lcd.print("Welcome");
lcd.setCursor(0, 1);
lcd.print("Select button");
lcd.setCursor(0, 0);
pinMode(LED_5, OUTPUT);
digitalWrite(LED_5, HIGH);
var1++;
}
// This function opens the actuators
void OpenPiston()
{
//leave the actuator to open for 10sec
currentMillis = millis();
while(millis()-currentMillis < ActuatorTime)
{
ledloop();
digitalWrite(IN1_PIN, HIGH);
digitalWrite(IN2_PIN, LOW);
digitalWrite(IN3_PIN, HIGH);
digitalWrite(IN4_PIN, LOW);
}
//stop the motor
digitalWrite(IN1_PIN, LOW);
digitalWrite(IN2_PIN, LOW);
digitalWrite(IN3_PIN, LOW);
digitalWrite(IN4_PIN, LOW);
//change the LCD
lcd.clear();
lcd.print("All open");
lcd.setCursor(0, 1);
lcd.print("stop button");
lcd.setCursor(0, 0);
//Update the LEDs
pinMode(LED_1, OUTPUT); //row 1
digitalWrite(LED_1, LOW);
pinMode(LED_2, OUTPUT); //row 2
digitalWrite(LED_2, LOW);
pinMode(LED_3, INPUT); //row 3
digitalWrite(LED_3, LOW);
pinMode(LED_4, OUTPUT);
digitalWrite(LED_4, HIGH);
//add some delay
pinMode(LED_4, OUTPUT);
digitalWrite(LED_4, LOW);
lcd.clear();
lcd.print("Welcome");
lcd.setCursor(0, 1);
lcd.print("Select button");
lcd.setCursor(0, 0);
pinMode(LED_5, OUTPUT);
digitalWrite(LED_5, HIGH);
var1++;
}
void ledloop()
{
switch ( ledState )
{
case 0:
if ( (millis() - pastLEDTicks) >= Count200 ) {
//turn on LED L1
pinMode(LED_1, OUTPUT); //row 1
digitalWrite(LED_1, LOW);
pinMode(LED_3, INPUT); //row 2
digitalWrite(LED_3, LOW);
pinMode(LED_2, OUTPUT); //row 3
digitalWrite(LED_2, HIGH);
pastLEDTicks = millis();
ledState = 1;
}
break;
case 1:
if ( (millis() - pastLEDTicks) >= Count200 )
{
//turn on LED L2
pinMode(LED_1, OUTPUT); //row 1
digitalWrite(LED_1, HIGH);
pinMode(LED_2, OUTPUT); //row 2
digitalWrite(LED_2, LOW);
pinMode(LED_3, INPUT); //row 3
digitalWrite(LED_3, LOW);
pastLEDTicks = millis();
ledState = 2;
}
break;
case 2:
if ( (millis() - pastLEDTicks) >= Count200 )
{
//turn on LED L3
pinMode(LED_1, INPUT); //row 1
digitalWrite(LED_1, LOW);
pinMode(LED_2, OUTPUT); //row 2
digitalWrite(LED_2, LOW);
pinMode(LED_3, OUTPUT); //row 3
digitalWrite(LED_3, HIGH);
pastLEDTicks = millis();
ledState = 3;
}
break;
case 3:
if ( (millis() - pastLEDTicks) >= Count200 )
{
//turn on LED L4
pinMode(LED_1, INPUT); //row 1
digitalWrite(LED_1, LOW);
pinMode(LED_2, OUTPUT); //row 2
digitalWrite(LED_2, HIGH);
pinMode(LED_3, OUTPUT); //row 3
digitalWrite(LED_3, LOW);
pastLEDTicks = millis();
ledState = 4;
}
break;
case 4:
if ( (millis() - pastLEDTicks) >= Count200 )
{
//turn on LED L5
pinMode(LED_2, INPUT); //row 1
digitalWrite(LED_2, LOW);
pinMode(LED_1, OUTPUT); //row 2
digitalWrite(LED_1, LOW);
pinMode(LED_3, OUTPUT); //row3
digitalWrite(LED_3, HIGH);
pastLEDTicks = millis();
ledState = 5;
}
break;
case 5:
if ( (millis() - pastLEDTicks) >= Count200 )
{
//turn on LED L6
pinMode(LED_1, OUTPUT); //row 1
digitalWrite(LED_1, HIGH);
pinMode(LED_2, INPUT); //row 2
digitalWrite(LED_2, LOW);
pinMode(LED_3, OUTPUT); //row3
digitalWrite(LED_3, LOW);
pastLEDTicks = millis();
ledState = 0;
}
break;
default:
ledState = 0;
break;
}
}
Again, a summary of the goal:
the general idea: I have:
-the LCD
-the speakers (so far I only created 0001, but depending on the action I would do other mp3 corresponding to the message to be said)
-the red LEDs in charlieplexing
-the blue LEDs
-the green LEDs
-the actuator A&B (that we run at the same time and have automated start stop)
-the keypad
-the button Open and Close
A1: When powering, LCD must show "welcome", and maybe speakers say 0001. LED blue is on.
A2: When touching keypad, LCD ask to set a button, and red LED blink 2x (using fast switch of 2ms for the whole code you made, this works), speakers tells to select a button (0002). Then after 5sec, it turns back to A1 again
A3: Button OPen and BUtton Close are now switched on, touching keypad triggers a LCD text that you have 2 buttons open, red LED blink 2x, speakers tells to close one button (0003), After 5 sec, it turns back to A1 again
A4: Button Open is on but Close is off, touching keypad triggers speaker to say "enter your code", and while you type, you see your code on the LCD. When you press "#", it checks if the code is right.
A4a: the code is wrong, the red LED blink 2x, the LCD says "incorrect", the speaker says "incorrect" (0004), it waits 2 sec and the LCD write "enter code again"
A4b: the code is right, the red lights starts turning around, while the Speaker says "opening the lock" (0005), and Motor A&B are opening. After 15sec, the LED green light on, the LCD says "door opened", the speaker "the door can be opened" (0005). It waits 5sec, LCD write "close button", speaker says "please close button", and it goes to A1 again.
And of course, A5 A5a and A5b would be same, with the close action.
From the hardware perspective, everything is working now. but not from the software then.
Any help ...