Wollte mich nochmal melden und zu verschiedenen Punkten Rückmeldung geben. Vielleicht hilft es anderen. Das Modellauto funktioniert nun endlich. Fast so gut wie das aus dem Modellbausport (also ich meine die professionelleren Bausätze).
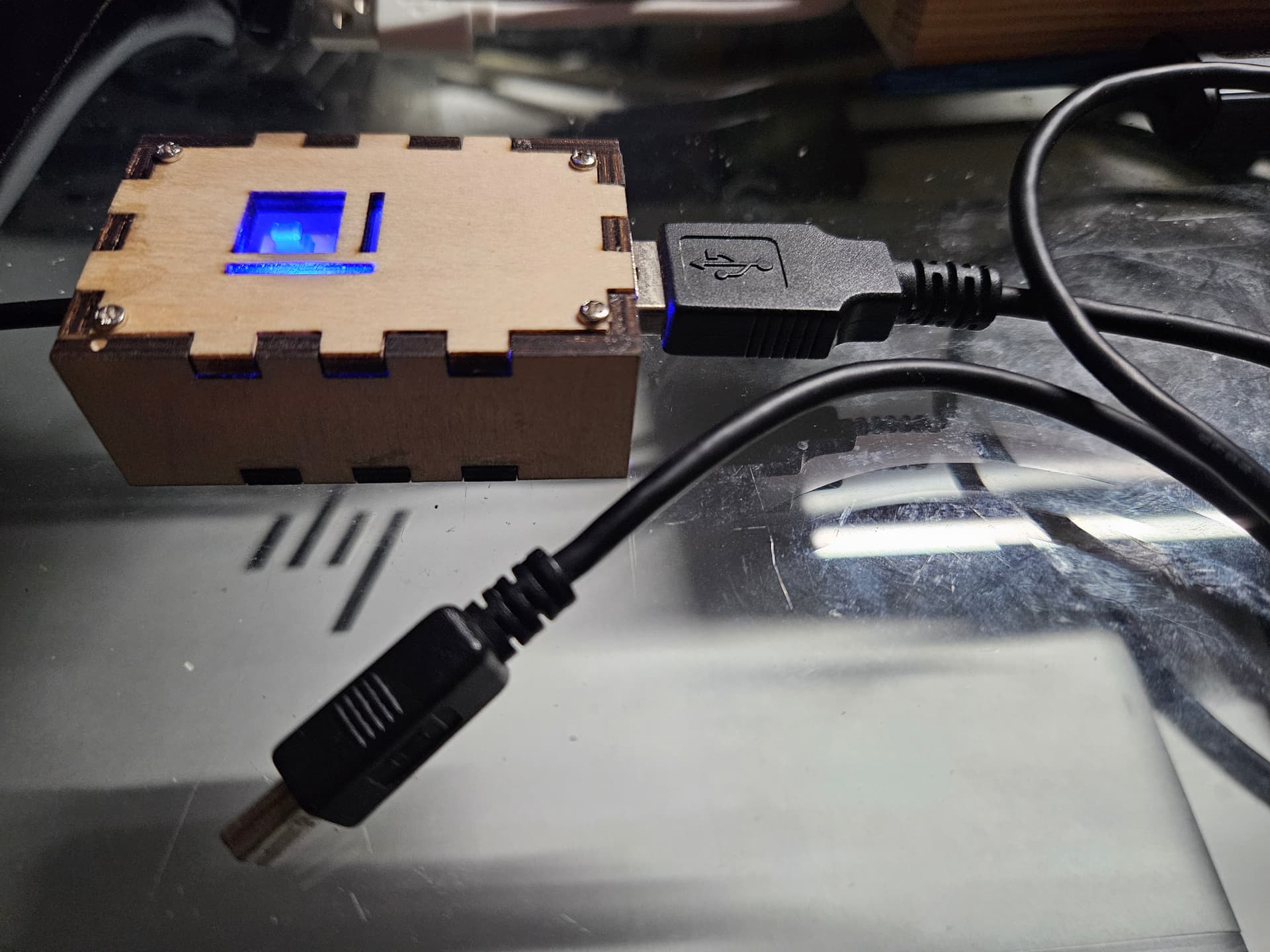
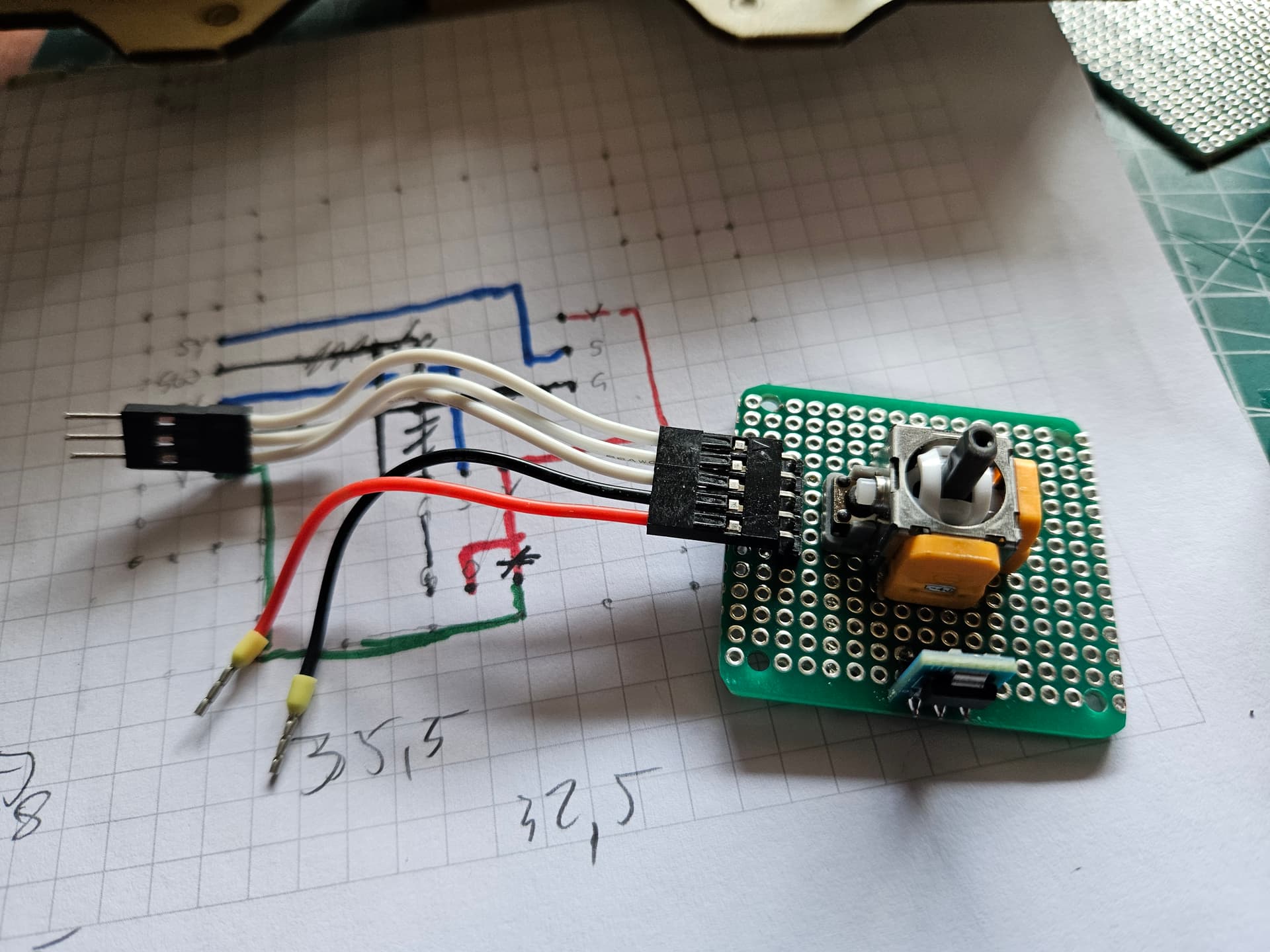
@HotSystems Den Adapter habe ich gebaut. Funktioniert auch. Getestet mit dem Modellauto und Strom aus dem LiPo via VIN am Arduino. Hier ist V+ nicht getrennt (die LED leuchtet). Schalter ist gedrückt. Man sieht es schlecht, da er blau ist und die LED auch 
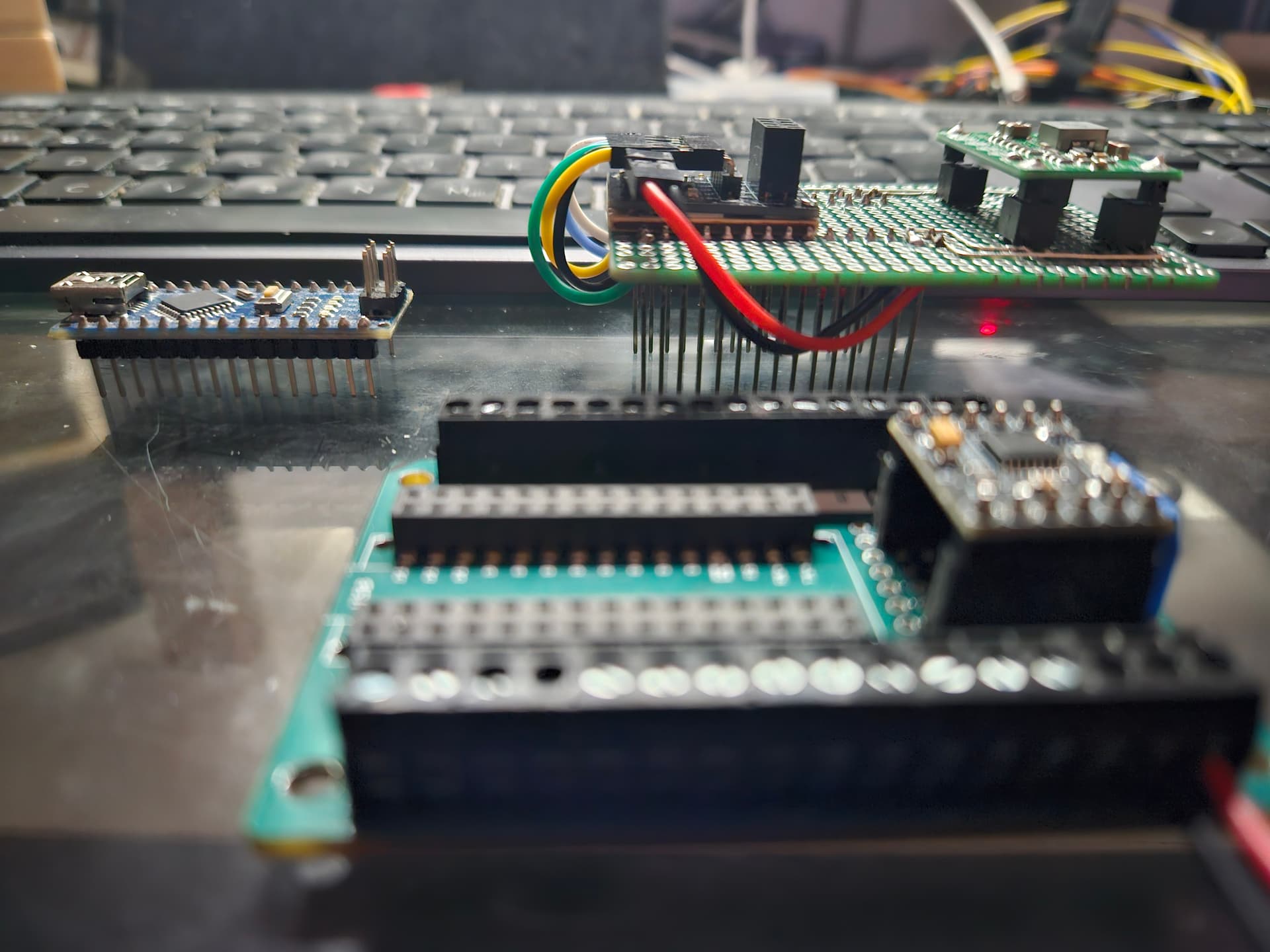
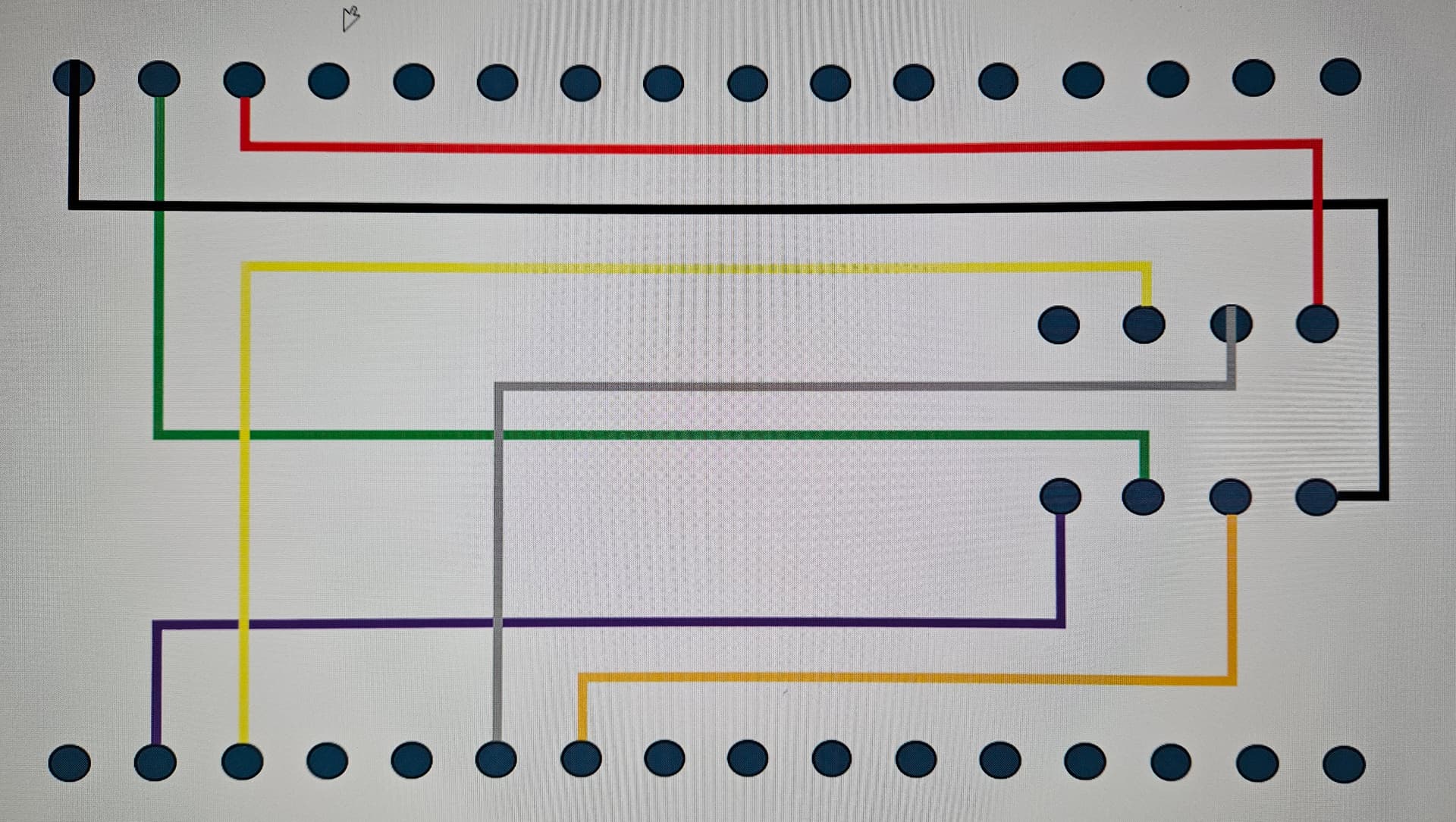
Lötpläne (ich nenne es bewusst so) nun mit PowerPoint. Ich habe unzählige Tools ausprobiert, aber leider nichts gefunden was einfach ist. Papier, Bleistift und Radiergummi nerven zunehmend. Falls hier jemand einen Tipp hat gern. Ein Tool mit dem man einfach ein Dummybauteil (Anschlüsse) darstellen kann (siehe Bild - Mitte rechts ist der Adapter für NRF Modul) und dann die Kabelstränge ziehen kann. Diese sollen als Objekt vorliegen (zwecks Verschiebbarkeit).
Die Pläne zeichne ich in der Draufsicht. Dann kann ich sie am Tablet drehen und spiegeln. Hier im Beispiel für die Anbindung des NRF24L01 mit alternativen Adapter und Montage (das Modul liegt direkt über dem Adapter und steht nicht nach hinten raus).
Und nun zum Auto... Es ist ein Bausatz, der lt. rudimentärer Anleitung mit einem Uno, Shield und Bluetooth gebaut wird (Link)
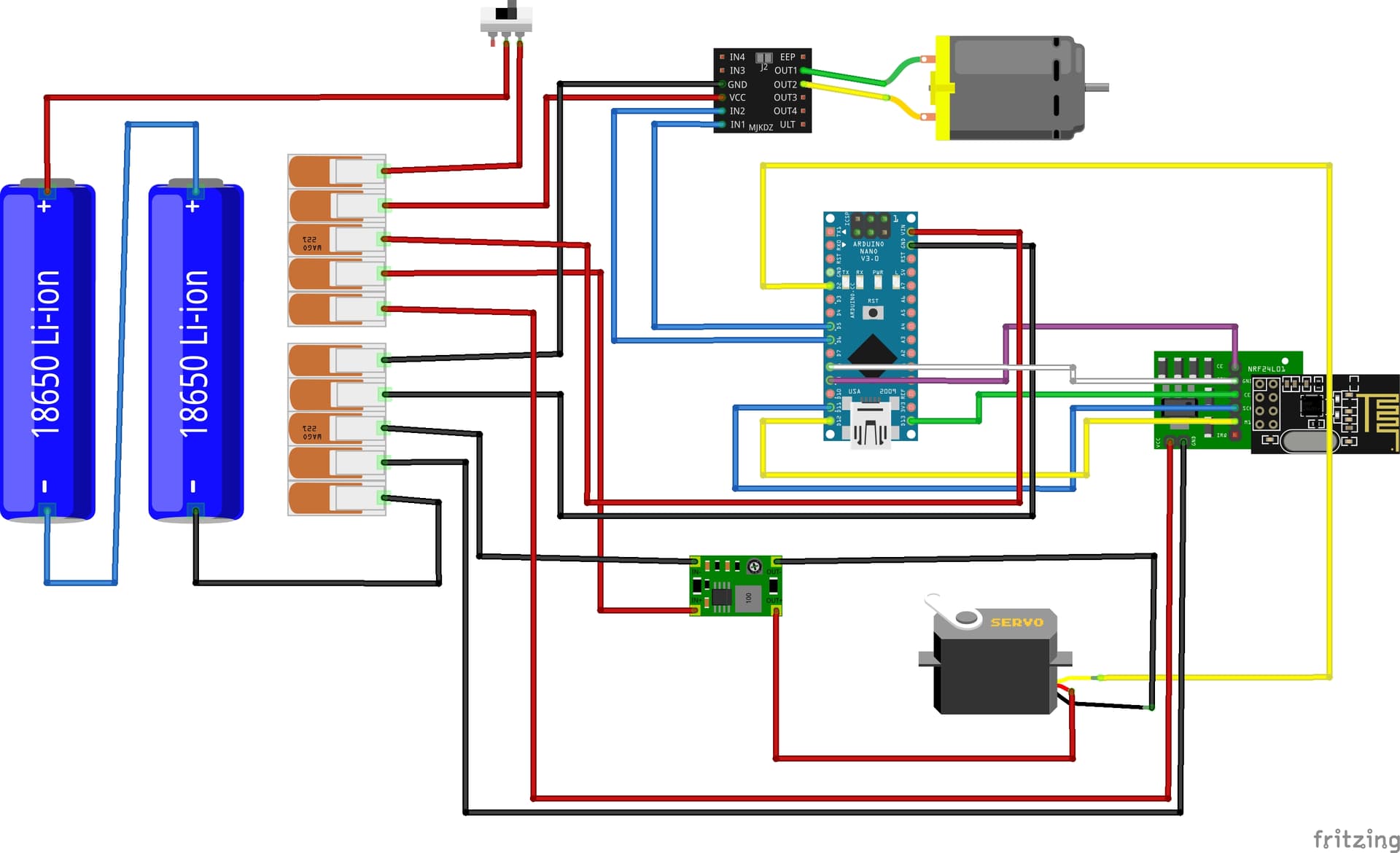
Die Gründe für Bluetooth sind im Nachhinein betrachtet möglicherweise Problem mit der Kombination SPI, Servo und PWM (Motor). Ich habe unzählige Versuche unternommen es wollte nicht richtig funktionieren. Folgende Kombination kann man probieren. OHNE GEWÄHR. Ich habe aus Frust meinen Prototyp zerlegt und weiß nicht mehr, welche Programmversion diejenige war, welche halbwegs funktioniert hat.
// pins am arduino
const uint8_t pinEngineIN1 = 5;
const uint8_t pinEngineIN2 = 6;
const uint8_t pinSteering = 2;
const uint8_t pinRF24CSN = 8;
const uint8_t pinRF24CE = 9;
Schlussendlich habe ich es ganz anders aufgebaut. Ich verwende einen ESC und zwar diesen Link.
Damit wird der Motor wie ein Servo behandelt. Motortreiber etc. entfällt. Das macht der ESC integriert. Außerdem liefert dieser gleichzeitig genügend Strom für den Servo für die Lenkung. Im Vergleich zu oben reduziert sich das ganze dann auf folgendes...
// pins am arduino
uint8_t pinEngine = 2;
uint8_t pinSteering = 3;
uint8_t pinRF24CE = 7;
uint8_t pinRF24CSN = 8;
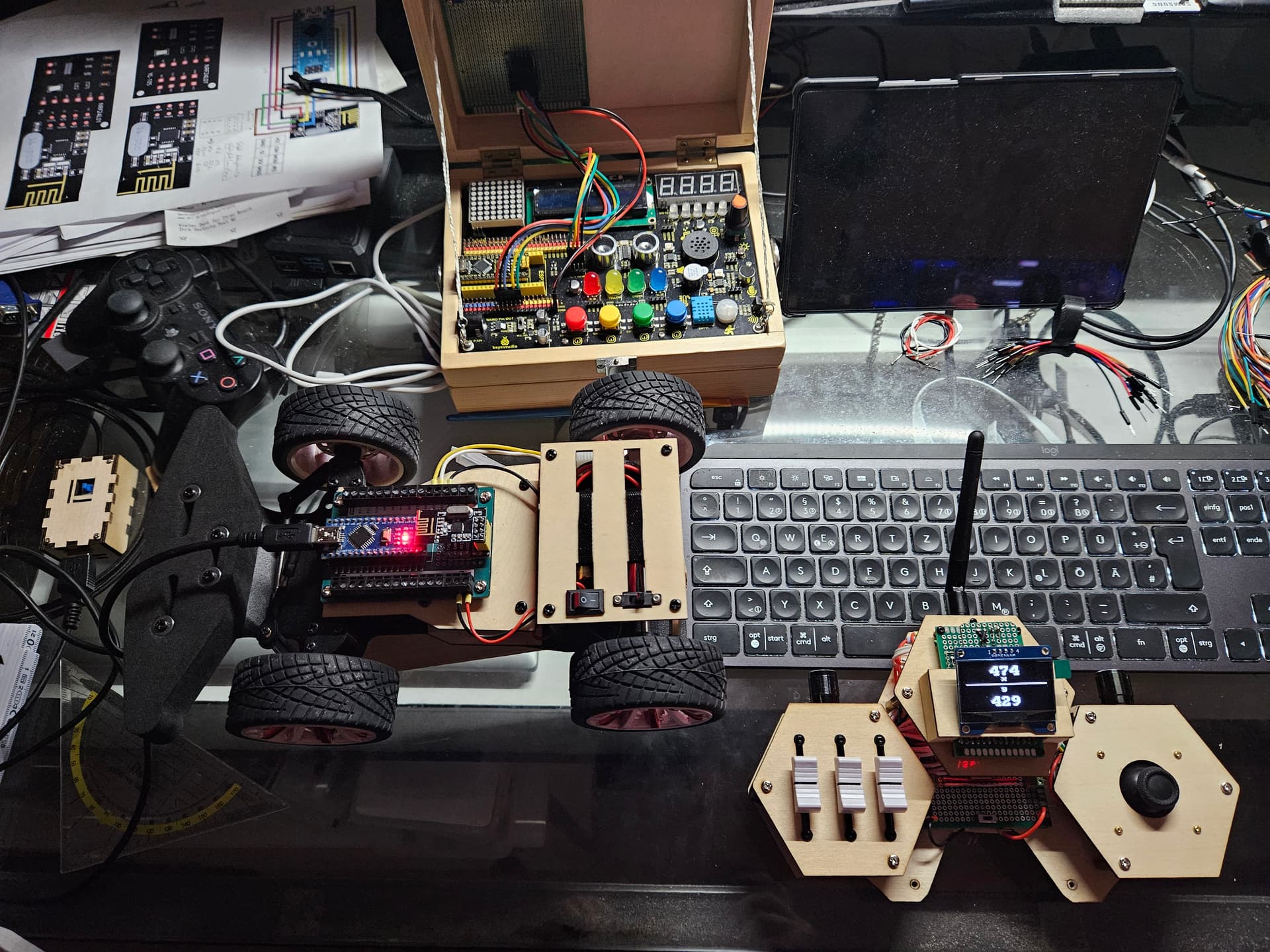
Und so sieht das ganze dann aus. Zu sehen auch die selbstgebaute 2.4GHz Funkfernsteuerung mit der ich verschiedene Dinge steuere (aktuell einen kleinen Roboter und das Auto).