Thank you for both of your replies, they are very helpful. It looks like I may be needing to get some new hardware then (either function generators or a Due!).
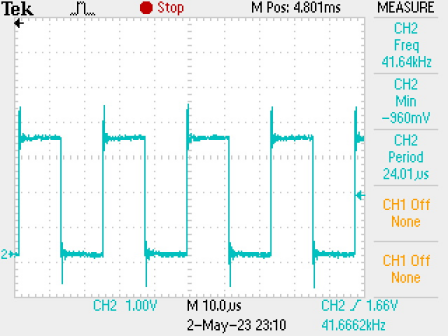
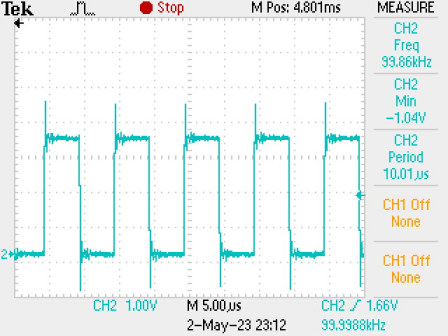
I was able to get a 40kHz signal from the Nano, but my limit was 56 kHz (just switching between high and low, not including the array). It's very promising that you were able to achieve 100kHz from the Due.
I know from the paper referenced above that phase control is possible for two signals, but I would need to control 12 signal independently. This may be a bit beyond this scope, but do you think this would be possible? I might need to somehow link multiple Arduinos.
I'm just adding the code included in the open source paper for reference, all credit goes to Asier Marzo and their coworkers. I don't really understand it but it looks like they experimented for a long time to get the number of clock cycles to wait for each step in order to produce the various signals:
#include <avr/sleep.h>
#include <avr/power.h>
#define N_PORTS 1
#define N_DIVS 24
#define WAIT_LOT(a) \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop")
#define WAIT_MID(a) \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop")
#define WAIT_LIT(a) \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop"); \
__asm__ __volatile__("nop")
#define OUTPUT_WAVE(pointer, d) PORTC = pointer[d * N_PORTS + 0]
#define N_BUTTONS 6
//half a second
#define STEP_SIZE 1
#define BUTTON_SENS 2500
#define N_FRAMES 24
static byte frame = 0;
static byte animation[N_FRAMES][N_DIVS] = { { 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x5, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0xa },
{ 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6, 0x6 },
{ 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x5, 0x9, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0xa, 0x6 } };
//0x5 = 0101, 0xa = 1010, 0x9 = 1001, 0x6 = 0110
void setup() {
/*
for (int i = 0; i < (N_PORTS*N_DIVS); ++i){
animation[frame][i] = 0;
}
for (int i = 0; i < (N_PORTS*N_DIVS/2); ++i){
animation[frame][i] = 0b11111111;
}
for(int i = 0; i < N_DIVS; ++i){
if (i % 2 == 0){
animation[frame][i * N_PORTS] |= 0b00000001;
}else{
animation[frame][i * N_PORTS] &= 0b11111110;
}
}
*/
DDRC = 0b00001111; //A0 to A3 are the signal outputs
PORTC = 0b00000000;
pinMode(10, OUTPUT); //pin 10 (B2) will generate a 40kHz signal to sync
pinMode(11, INPUT_PULLUP); //pin 11 (B3) is the sync in
//please connect pin 10 to pin 11
for (int i = 2; i < 8; ++i) { //pin 2 to 7 (D2 to D7) are inputs for the buttons
pinMode(i, INPUT_PULLUP);
}
// generate a sync signal of 40khz in pin 10
noInterrupts(); // disable all interrupts
TCCR1A = bit(WGM10) | bit(WGM11) | bit(COM1B1); // fast PWM, clear OC1B on compare
TCCR1B = bit(WGM12) | bit(WGM13) | bit(CS10); // fast PWM, no prescaler
OCR1A = (F_CPU / 40000L) - 1;
OCR1B = (F_CPU / 40000L) / 2;
interrupts(); // enable all interrupts
// disable everything that we do not need
ADCSRA = 0; // ADC
power_adc_disable();
power_spi_disable();
power_twi_disable();
power_timer0_disable();
//power_usart0_disable();
Serial.begin(115200);
byte* emittingPointer = &animation[frame][0];
byte buttonsPort = 0;
bool anyButtonPressed;
bool buttonPressed[N_BUTTONS];
short buttonCounter = 0;
LOOP:
while (PINB & 0b00001000)
; //wait for pin 11 (B3) to go low
OUTPUT_WAVE(emittingPointer, 0);
buttonsPort = PIND;
WAIT_LIT();
OUTPUT_WAVE(emittingPointer, 1);
anyButtonPressed = (buttonsPort & 0b11111100) != 0b11111100;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 2);
buttonPressed[0] = buttonsPort & 0b00000100;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 3);
buttonPressed[1] = buttonsPort & 0b00001000;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 4);
buttonPressed[2] = buttonsPort & 0b00010000;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 5);
buttonPressed[3] = buttonsPort & 0b00100000;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 6);
buttonPressed[4] = buttonsPort & 0b01000000;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 7);
buttonPressed[5] = buttonsPort & 0b10000000;
WAIT_MID();
OUTPUT_WAVE(emittingPointer, 8);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 9);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 10);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 11);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 12);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 13);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 14);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 15);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 16);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 17);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 18);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 19);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 20);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 21);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 22);
WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 23);
if (anyButtonPressed) {
++buttonCounter;
if (buttonCounter > BUTTON_SENS) {
buttonCounter = 0;
if (!buttonPressed[0]) {
if (frame < STEP_SIZE) {
frame = N_FRAMES - 1;
} else {
frame -= STEP_SIZE;
}
} else if (!buttonPressed[1]) {
if (frame >= N_FRAMES - STEP_SIZE) {
frame = 0;
} else {
frame += STEP_SIZE;
}
} else if (!buttonPressed[2]) {
frame = 0;
}
emittingPointer = &animation[frame][0];
}
} else {
buttonCounter = 0;
}
goto LOOP;
}
void loop() {}
Thank you already for all your help!