Robin2 thank you for the reply.
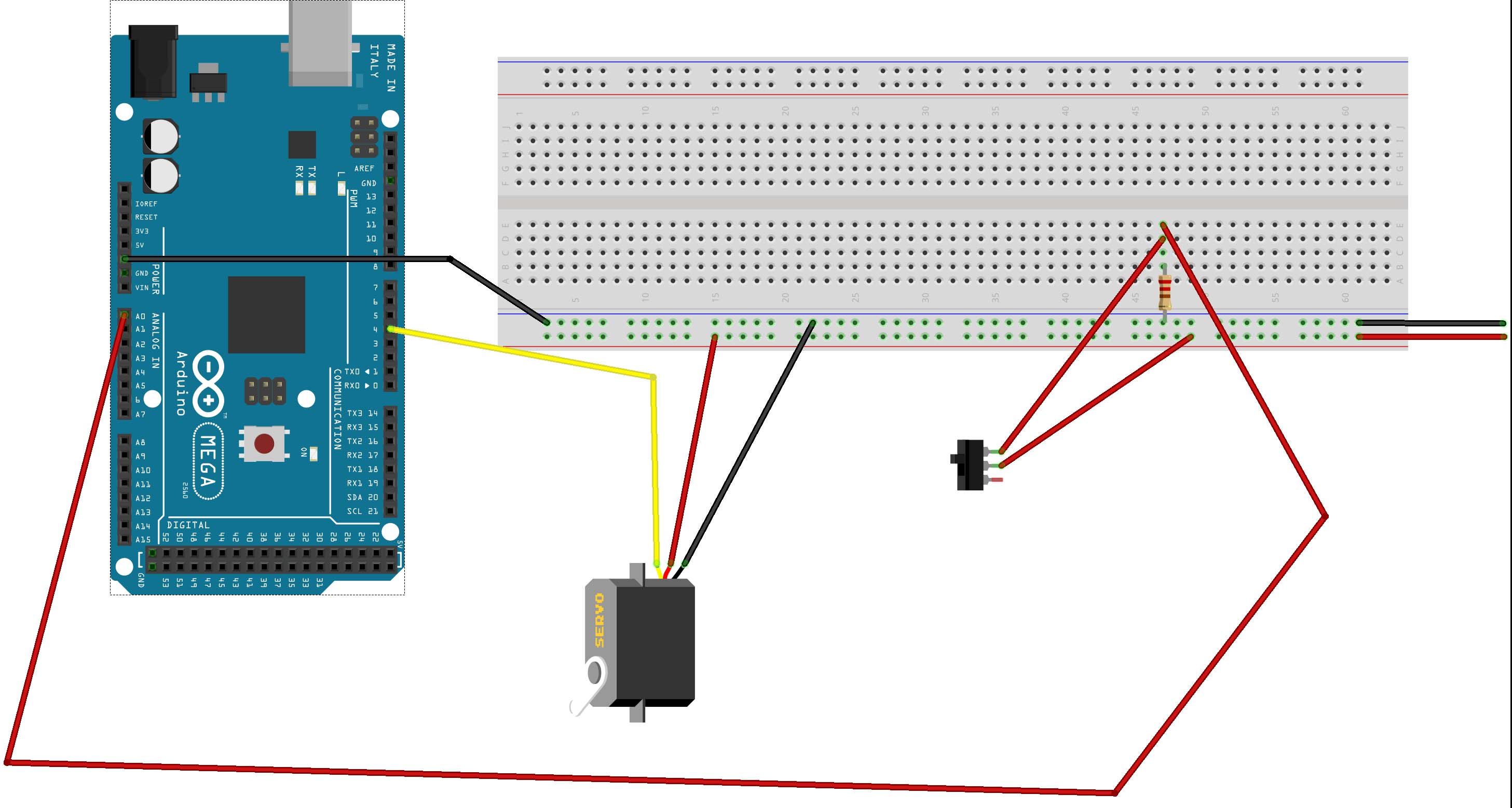
I have been using a seperate power supply for the Mega and a totally seperate supply for the servo. The breadboard's power runs down the entire rail so no problems there and I have used a common ground from the breadboard to the Mega.
The programme/sketch I have used was downloaded from the original post from Anders53 and it worked for roboz6. It is as follows,
*/
#include <VarSpeedServo.h>
#include <Bounce2.h>
// Constants to trim switch servo behaviour, mid = midpoint parameters
// Servo button nr = { 0, 1, 2, 3, 4, 5, 6, 7,mid}
const byte buttonPins[] = {A0, A1, A2, A3, A4, A5, 2, 3, 12};
const byte servoPins[] = { 4, 5, 6, 7, 8, 9, 10, 11, 13};
const byte rangeLow[] = {85, 85, 85, 85, 85, 85, 85, 85, 90};
const byte rangeHigh[] = {95, 95, 95, 95, 95, 95, 95, 95};
const byte travelSpeed[] = { 2, 2, 2, 2, 2, 2, 2, 2, 50};
const byte numberServos = 8; // the total number of servos
const long detachTime = 5000; // detach servo after 5 seconds
const long bounceDelay = 10; // Button debouncing delay; increase if the servo sweeps
// Work variables
boolean holdReadVal = 1; // Holds immidiate switch button read value
boolean midPointVal = 1; // Holds immidiate midppoint setting button read value
boolean midState = 0; // To remember if midpoint setting was traversed
// arrays holding work variables
VarSpeedServo myServos[numberServos]; // Servo objects
Bounce debouncer[numberServos + 1] = Bounce(); // Bounce objects
unsigned long detachMillis[numberServos] = {0}; // Detach timer for each servo object
boolean switchState[numberServos] = {0}; // Holds the status for each switch
void setup()
{
Serial.begin(9600);
for (byte i = 0; i < numberServos + 1; i++)
{
pinMode(servoPins[i], OUTPUT); // Define digital pin as output
pinMode(buttonPins[i], INPUT_PULLUP); // Define digital input pin with pull up resistor for noise reduction
debouncer[i].attach(buttonPins[i]); // Attach input pins to debouncer objects
debouncer[i].interval(bounceDelay); // Debouncing delay interval
}
readTrackLayout(); // Read the switch status from layout
}
void loop() // runs forever to detect control buttons and change switches accordingly
{
digitalWrite(servoPins[8], !digitalRead(servoPins[8])); // Code activity LED, dimmed when code runs, dark or full light if code is trapped
if (!midPointVal) delay(500); // Slow down loop activity while midpoint is set, to blink LED at slow pace
bounceReadInput(8); // ### Read the midpoint button input
if (!midPointVal) // ### Is midpoint button active LOW ?
{
setMidpoint(); // ### Yes, midpoint button active, and servos not yet at midpoint, set at midpoint
}
if (midPointVal && midState) // %%% Midpoint button is set inactive high (idle), and servos are at midpoint
{
readTrackLayout(); // %%% - then read the track layout buttons
}
if (midPointVal) // Midpoint button is incative HIGH, control the servos
{
for (byte i = 0; i < numberServos; i++)
{
bounceReadInput(i); // *** Read the control button inputs
if ((holdReadVal != switchState[i])) // *** Has the button state changed ?
{
controlSwitches(i); // *** Yes, then set the switch to new position
} // *** No, the button state has not changed, is it time to detach servo then ?
if (myServos[i].attached() && ((millis() - detachMillis[i]) > detachTime))
{
myServos[i].detach(); // *** Yes, the time has elapsed, detach the switch servo for a more silent layout
}
}
}
}
void bounceReadInput(byte i) // Read debounced button inputs
{
debouncer[i].update(); // Update the Bounce instance
if (i < 8)
{
holdReadVal = debouncer[i].read(); // Get the updated debounced button value
}
else
{
midPointVal = debouncer[i].read(); // Get the updated midpoint button value
}
}
void setMidpoint() // This function is called asynchronous to counter in the main loop
{ // - because the midpoint button is set at random
for (byte i = 0; i < numberServos; i++) // A local counter must then be used to set all servos
{
myServos[i].slowmove(rangeLow[8], travelSpeed[8]); // Set all servos at midpoint, index 8 in array
servoAttach(i); // Only after pre-setting the position control, it's safe to attach the servo
}
midState = HIGH; // Remember we were here to set midpoint, do not repeat it
}
void readTrackLayout() // This function is called asynchronous to counter in the main loop
{ // - because the midpoint button is set at random
for (byte i = 0; i < numberServos; i++) // A local counter must then be used to set all servos
{
switchState[i] = digitalRead(buttonPins[i]); // Read the current switch state from the track layout
writeBeforeAttach(i); // Write data before attaching servo
}
midState = LOW; // Remember we were here to get layout, enable possibilty to set midpoint again
}
void controlSwitches(byte i)
{
switchState[i] = !switchState[i]; // Save new switch state
writeBeforeAttach(i); // Write data before attaching servo
}
void writeBeforeAttach(byte i) // Write data before attaching servo
{
if (switchState[i]) // Is the new switch state high (greater than 0) ?
{
myServos[i].slowmove(rangeHigh[i], travelSpeed[i]); // Yes, new switch state is high, move the switch accordingly
}
else
{
myServos[i].slowmove(rangeLow[i], travelSpeed[i]); // No, new switch state is low, move the switch accordingly
}
servoAttach(i); // Only after pre-setting the position control, it's safe to attach the servo
}
void servoAttach(byte i) // Only after pre-setting the position control, it's safe to attach the servo
{
detachMillis[i] = millis(); // Initialise the detach timer
myServos[i].attach(servoPins[i]); // Attaches the servo on output pin to its servo object
}