Hello!
I'm making line follower, it has to follow black line on grey wooden background:
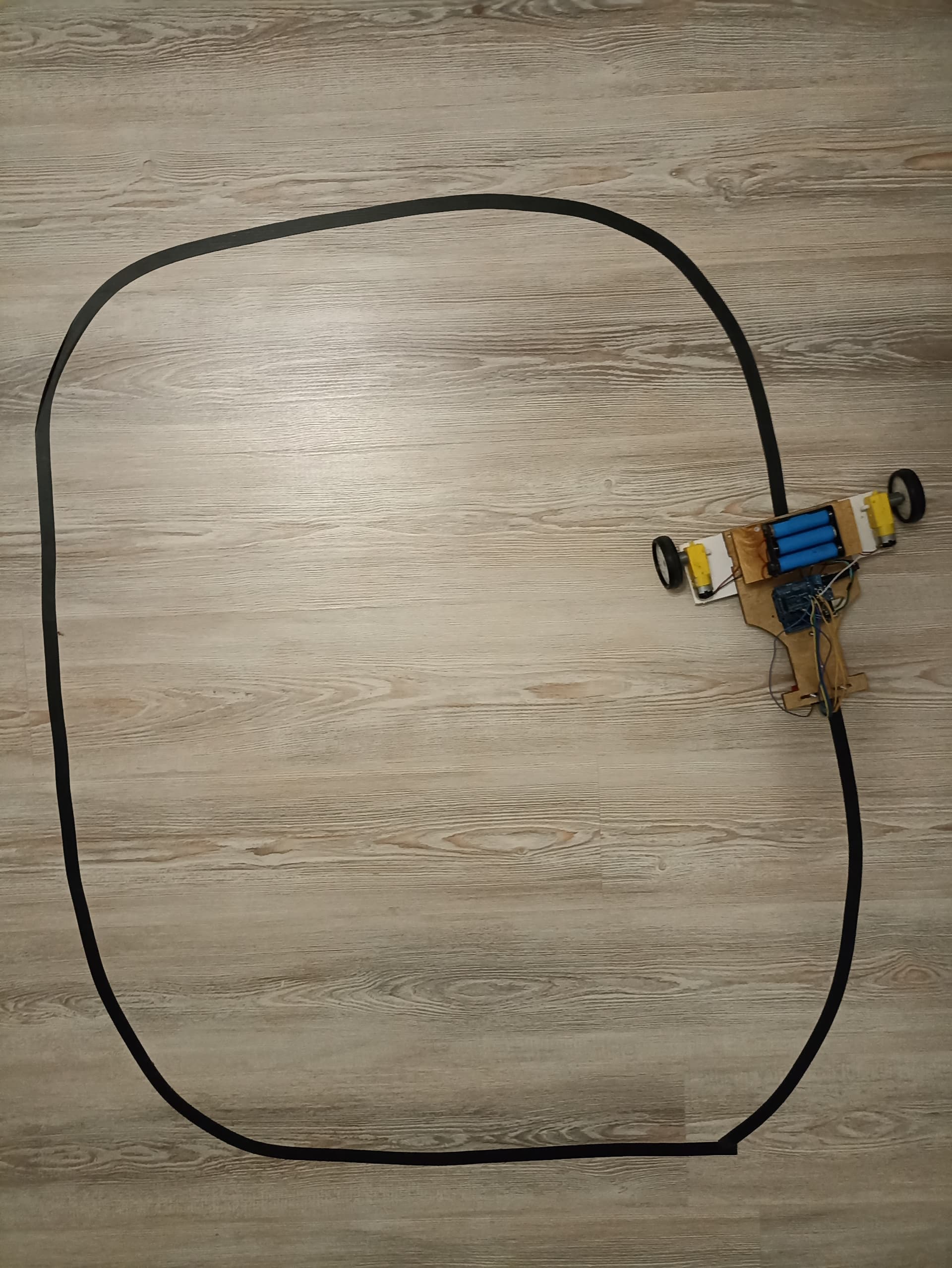
problem is, that it follows wooden lines instead of tape
I've seen line follower, that follows tape on brown wooden background.
Here's my code:
#include <QTRSensors.h>
#include <Arduino.h>
#include <SoftwareSerial.h>
//Defning pins for motors
#define left_mtr_frwrd 7
#define left_mtr_bkwrd 6
#define right_mtr_frwrd 4
#define right_mtr_bkwrd 5
#define left_mtr_sped 9
#define right_mtr_sped 10
//define variables for qtr sensor array
QTRSensors qtr;
const uint8_t SensorCount = 6;
uint16_t sensorValues[SensorCount];
//define constants for PID
const double KP = 0.04;
const double KD = 0;
double lastError = 0;
int GOAL = 2500;
const unsigned char max_speed = 100;
void setup() {
//Starting serial to exchange status with our PC
Serial.begin(9600);
qtr.setTypeAnalog();
qtr.setSensorPins((const uint8_t[]){ A0, A1, A2, A3, A4, A5 }, SensorCount);
qtr.setEmitterPin(2);
delay(500);
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH); // turn on Arduino's LED to indicate we are in calibration mode
//turn motors on, so it can turn himself around to calibrate
// analogRead() takes about 0.1 ms on an AVR.
// 0.1 ms per sensor * 4 samples per sensor read (default) * 8 sensors
// * 10 reads per calibrate() call = ~24 ms per calibrate() call.
// Call calibrate() 400 times to make calibration take about 9.8 seconds.
for (uint16_t i = 0; i < 400; i++) {
qtr.calibrate();
}
digitalWrite(LED_BUILTIN, LOW); // turn off Arduino's LED to indicate we are through with calibration
for (uint8_t i = 0; i < SensorCount; i++) {
Serial.print(qtr.calibrationOn.minimum[i]);
Serial.print(' ');
}
Serial.println();
// print the calibration maximum values measured when emitters were on
for (uint8_t i = 0; i < SensorCount; i++) {
Serial.print(qtr.calibrationOn.maximum[i]);
Serial.print(' ');
}
Serial.println();
Serial.println();
delay(1000);
motor(1, 0, 1, 0);
}
void loop() {
// read calibrated sensor values and obtain a measure of the line position
// from 0 to 5000 (for a white line, use readLineWhite() instead)
uint16_t position = qtr.readLineBlack(sensorValues);
//compute eerror
int error = GOAL - position;
//Compute motor adjustment
int adjustment = (KP) * (error) + KD * (error - lastError);
//Store error for next iteration
lastError = error;
//Adjust motors
motor_speed(constrain((max_speed - adjustment), 0, max_speed), constrain((max_speed + adjustment), 0, max_speed));
}
And my functions:
// function to easily control motors; e.g. motor(1, 0, 1, 0); - forward
void motor( int left_frwrd, int left_bkwrd, int right_frwrd, int right_bkwrd) {
digitalWrite(left_mtr_frwrd, left_frwrd);
digitalWrite(left_mtr_bkwrd, left_bkwrd);
digitalWrite(right_mtr_frwrd, right_frwrd);
digitalWrite(right_mtr_bkwrd, left_bkwrd);
}
//function to easily control speed of motor
void motor_speed(int left_sped, int right_sped) {
analogWrite(left_mtr_sped, left_sped);
analogWrite(right_mtr_sped, right_sped);
}
void ir_status() {
// print the sensor values as numbers from 0 to 1000, where 0 means maximum
// reflectance and 1000 means minimum reflectance, followed by the line
// position
for (uint8_t i = 0; i < SensorCount; i++)
{
Serial.print(sensorValues[i]);
Serial.print('\t');
}
// Serial.println(position);
}
thanks for your time