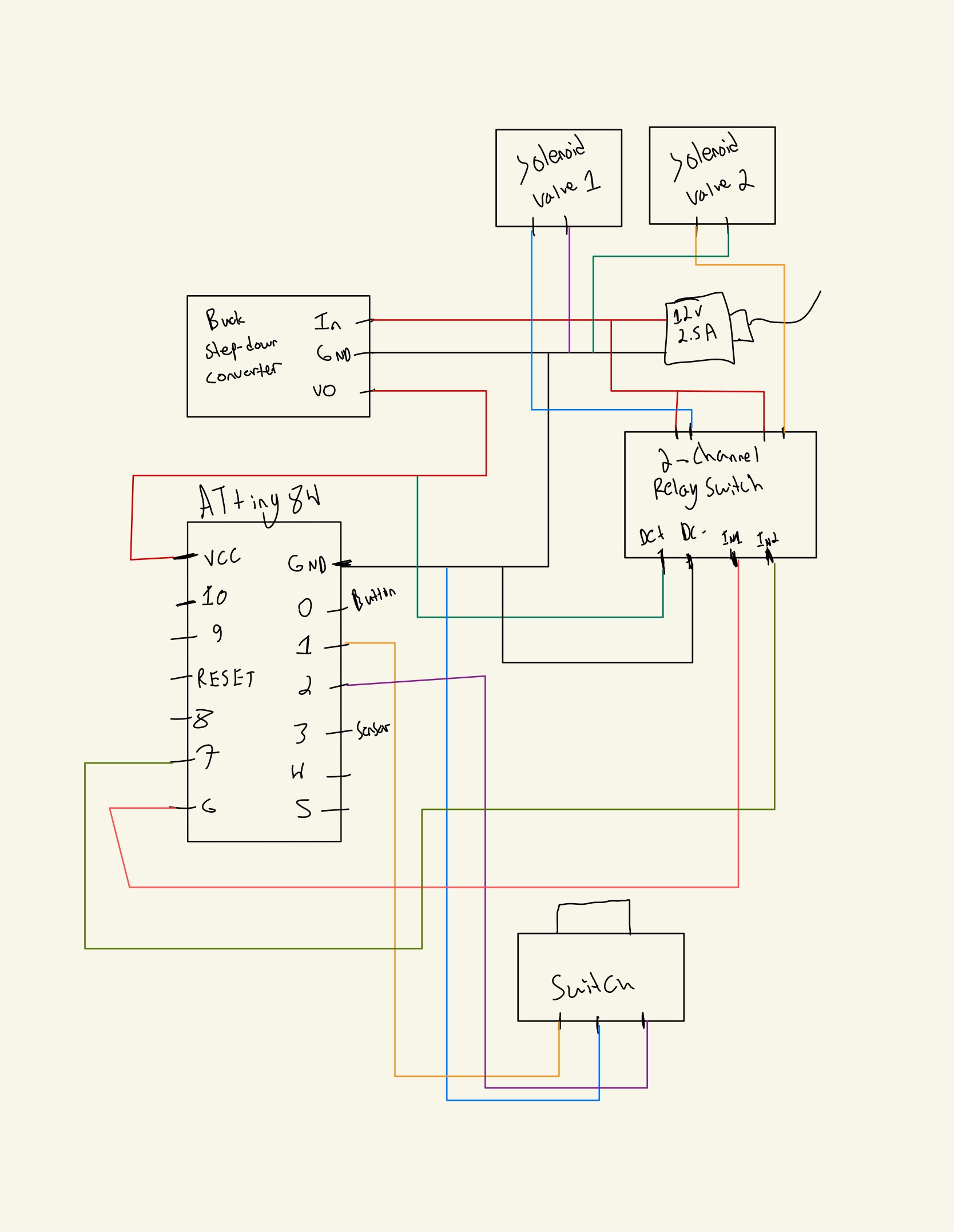
HI! I'm making a Halloween decoration that uses relay switches, an ATtiny84, and other small components. I'm supplying the whole circuit with a 12V 2.5A DC adapter, however, I also have a buck step-down converter that steps down the power to 5V for the relay switches and the ATtiny84. I've programmed the relay switches to open and close with a delay in between but for some reason, they open and close at a fast rate which is not how they're programmed to be. Moreover, after a variable amount of activations, the activation doesn't work unless I shut off the power and supply the power once again. I tried using an external 5V 2A power supply for the relay switches alone but that was also problematic (they behaved differently as well). I'm thinking that the way I supply the relay switches or the ATiny84 may be the root of the problem but I'm not entirely sure. Does anyone know what I might be doing wrong? Many thanks! : )
Code:
//#include <SoftwareSerial.h>
//#include <DFRobotDFPlayerMini.h>
// ---- MACROS/PINS ----
#define TRY_ME_BUTTON 0 // 0
#define SENSOR_MODE 1 // 1
#define TRY_ME_MODE 2 // 2
#define SENSOR 3 // 3
#define RX 4 // 4
#define TX 5 // 5
#define CHANNEL_ONE 6 // 6
#define CHANNEL_TWO 7 // 7
// ---- VARIABLES ----
//SoftwareSerial mySoftSerial(TX, RX);
//DFRobotDFPlayerMini myDFMini;
// ---- FUNCTION PROTOTYPES ----
void activationDo();
void armOneMoveDo(byte numTimes, float waitInBetween);
void armTwoMoveDo(byte numTimes, float waitInBetween);
void upDownMoveDo(byte numTimes, float waitInBetween);
void wait(float timeInSeconds);
// ---- FUNCTIONS ----
void setup() {
pinMode(TRY_ME_MODE , INPUT_PULLUP);
pinMode(SENSOR_MODE , INPUT_PULLUP);
pinMode(TRY_ME_BUTTON, INPUT_PULLUP);
pinMode(SENSOR , INPUT);
pinMode(CHANNEL_ONE , OUTPUT);
pinMode(CHANNEL_TWO , OUTPUT);
// mySoftSerial.begin(9600);
// myDFMini.begin(mySoftSerial);
// myDFMini.volume(23); // 23
digitalWrite(CHANNEL_ONE, LOW);
digitalWrite(CHANNEL_TWO, LOW);
}
void loop() {
if(!digitalRead(TRY_ME_MODE)){
if(!digitalRead(TRY_ME_BUTTON)) activationDo();
}
else if(!digitalRead(SENSOR_MODE)){
if(digitalRead(SENSOR)) activationDo();
}
}
void activationDo(){
// myDFMini.play(1);
upDownMoveDo(1, 3);
for(byte i = 0; i < 2; i++){
armOneMoveDo(3, 2);
armTwoMoveDo(3, 3);
upDownMoveDo(3, 2);
armTwoMoveDo(4, 2);
upDownMoveDo(3, 2);
armOneMoveDo(4, 2);
upDownMoveDo(2, 3);
}
}
void armOneMoveDo(byte numTimes, float waitInBetween){
for(byte i = 0; i < numTimes; i++){
digitalWrite(CHANNEL_ONE, HIGH);
wait(waitInBetween);
digitalWrite(CHANNEL_ONE, LOW);
wait(waitInBetween);
}
}
void armTwoMoveDo(byte numTimes, float waitInBetween){
for(byte i = 0; i < numTimes; i++){
digitalWrite(CHANNEL_TWO, HIGH);
wait(waitInBetween);
digitalWrite(CHANNEL_TWO, LOW);
wait(waitInBetween);
}
}
void upDownMoveDo(byte numTimes, float waitInBetween){
for(byte i = 0; i < numTimes; i++){
digitalWrite(CHANNEL_ONE, HIGH);
digitalWrite(CHANNEL_TWO, HIGH);
wait(waitInBetween);
digitalWrite(CHANNEL_ONE, LOW);
digitalWrite(CHANNEL_TWO, LOW);
wait(waitInBetween);
}
}
void wait(float timeInSeconds){
delay(timeInSeconds * 1000);
}
Circuit:
Here's a video of the relay switch using step-down voltage, and here's a video of the relay switch using external 5V 2A voltage.
