I've been working on and off on this:
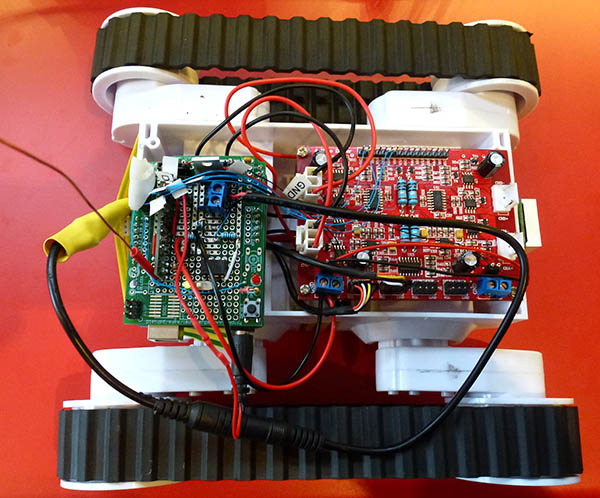
Construction details here:
The post describes various issues with using a radio transmitter, receiver, battery voltage sensing, current sensing, sending commands via wireless and so on.
The tracks are a pain, BTW. They make it very hard to turn nicely. If you slow one side down then it basically just drags, rather than turning smoothly.
The wild thumper wheels I'm using drag on carpet or grass, they REALLY dig up a soft surface.
Took mine for it's first run this morning, mounted up a Swan 2.4g digital camera.
Had no problems with video or control via XBee.
I'll post some video on youtube as soon as I get more net credit.
Going to try it @night with the IR illuminator.
I just watched your video, with the wild thumper wheels it handles pretty much the same.
One thing that was pointed out to me this morning,
the way we were both driving is EXACTLY what gets guys yelled at here on the farm when they operate the Skid steer loader!
The pivot on the spot turning is fine for a building site, but anywhere you DONT want the ground cut to hell, it sucks!
Nick, I'm happy to see this together!
And thanks so much for really documenting what you did and especially your trouble-shooting. So many people get discouraged when things don't work right off, and these examples help them understand that this is "Normal"!
I should have a Rover5 base like that in a couple of weeks and I will be working on a detailed How-To with the Dagu parts and Arduino for LetsMakeRobots.com
You're a tough act to follow  How / what software or system did you do the authoring of the article?? What "scope" did you use?
How / what software or system did you do the authoring of the article?? What "scope" did you use?
Nice work!
Thanks Terry!
I like to document stuff, to "pay back" those helpful people who got me started by documenting what they did, like LCD screens, and so on.
The authoring was just done "by hand" basically uploading sketches, photos and screen shots to my own forum which has similar forum tags to this one (eg. images, code tags).
I edited some photos with Photoshop to add labels.
The scope is an Atten ADS1102CML which I recently bought on eBay. It's handy for taking screen shots because you just stick a USB stick in and hit the Print button.
As for the debugging, well my motto is "don't give up!" - even if it is 4 hours later and the problem isn't solved. If necessary I throw everything at problems, eg.
- Debugging prints (eg. Serial.println)
- Hook LEDs up to spare pins and toggle them to show a certain point of code was reached
- Logic analyzer to see data flow, and see what pins are toggled
- The scope to see subtle things like voltages not right, or "square" waves being not-so-square
- Multimeter to measure voltages and currents
- Indicator LEDs on the boards
- Send debug messages to another board with SPI as I documented elsewhere
- Google to see if other people had a similar problem
- Write a small test program to test something like a transmitter before trying to incorporate more things like nunchuks.
I'm not totally happy with the responsiveness of the radio control, so have been experimenting over the last day with Manchester encoding (inspired by another post in this forum).
However I wanted to do it with interrupts so you could be driving around doing stuff while the next message arrived. Most of the examples I have seen of Manchester decoding "block" while reading, which I didn't want to do. It's working better, but it's not perfect yet. When I am satisfied that it is going as well as you can expect for the hardware I'll document the interrupt-driven Manchester decoding.
Do you know where you can get the plain wheels rather than the tracks? The tracks are a bit of a pain for nimble maneuvering.
I think I have the Manchester encoding working now. There is another post on my forum about that. If anyone wants a Manchester encoding library that uses interrupts, that is provided there too.
I got an idea from reading about the encoding used for TV remotes. Apparently they often send the same codes twice or more often, the idea being that at least one should get through.
I added an extra line to the transmitter to simply send exactly the same message again, and that seems to help with reliability.
Do you know where you can get the plain wheels rather than the tracks?
I should be able to get these from Dagu, but I don't stock them yet. I'll check and let you know..