I wanted to comment on your discussion about manual movement of the arm for teaching.
With standard hobby servos, this is risky. Manually forcing a hobby servo can strip the gears. Also, if the servo is attached, then it cannot be moved manually.
I see that you are not using typical hobby servos. Have you been able to interface to them at all?
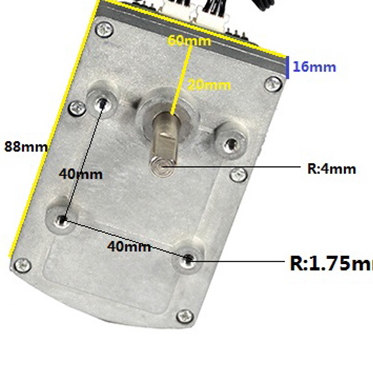

Your images do not show much detail for identifying these. Can you post more pics? I am interested in seeing the control board and the test on all stickers. (one is obscured by the zip tie)