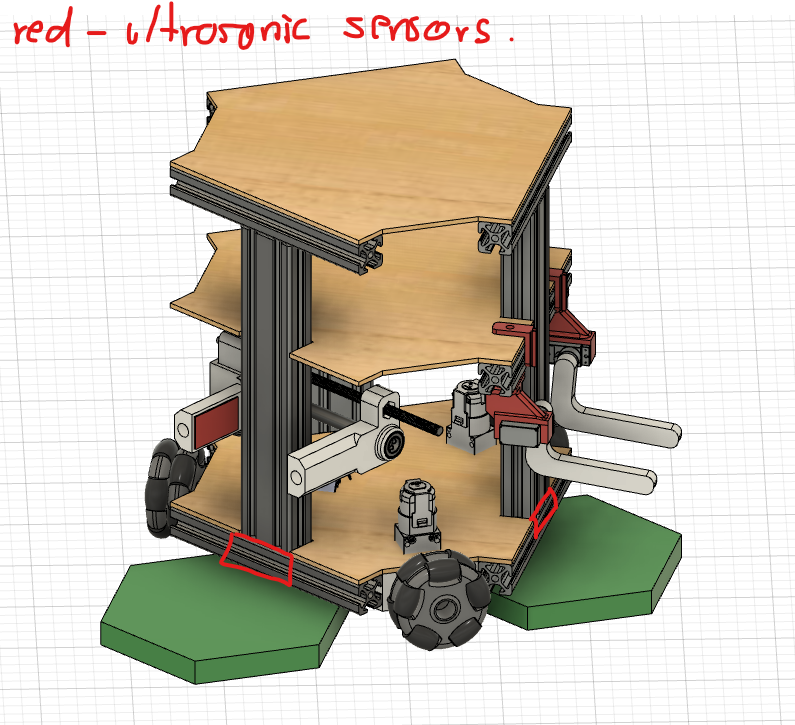
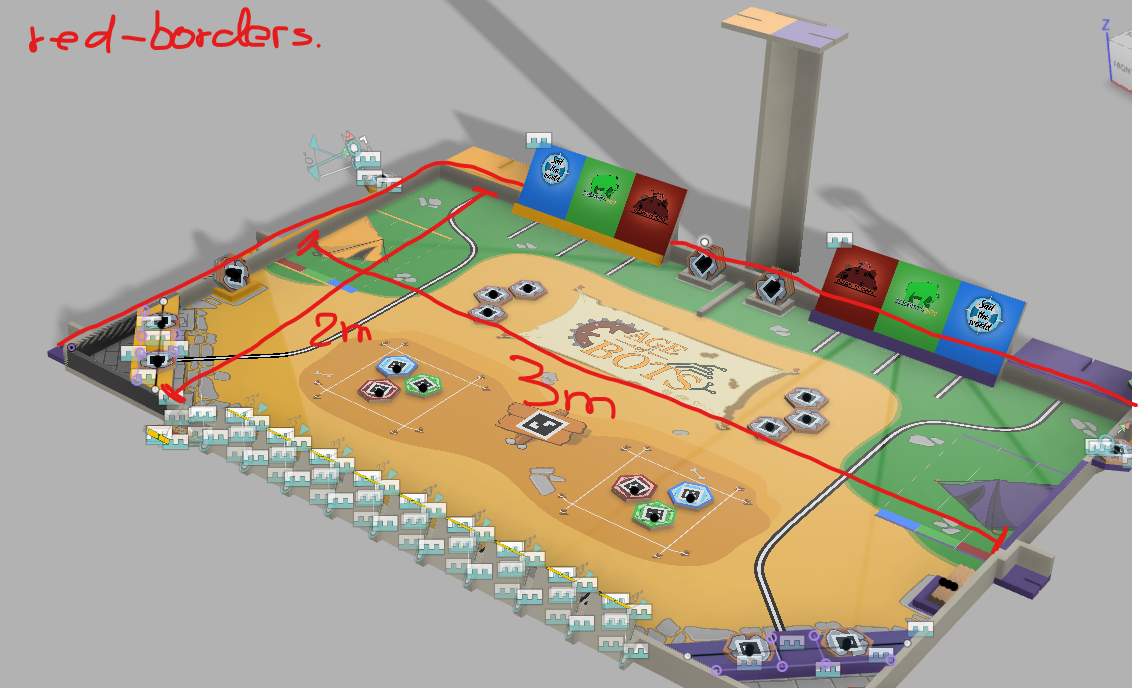
I need to make my robot autonomous so I need a positioning sysetem, it will operate in a certain table (I know all the exact dimensions and obstacles). It has a hexagonal shape, featuring three ultrasonic sensors to detect the borders of the surroundings. I was wondering which method I should be using to calculate the position of the robot. Each ultrasonic sensor gives me a distance, the angle between each ultrasonic is known (360º / 3 = 120º). The size of the field is 2 * 3m (it has a triangular shape), which gives me a problem, the ultrasonic range is only 2m so I can't scan the distance in that direction. My idea was to use a gyroscope to determine the ratational angle of the robot respect each axes (x and y), so therefore I could rotate the robot till each ultrasonic sensor is perpendicular to the borders. Is there any other option of doing this without the gyroscope? Or any other method in general...? There are some images below
A digital compass (magnetometer) will report the angle from magnetic North, if local magnetic fields do not interfere with the measurement.
Actually mi gyroscope (BNO055) it's an absolute position sensor including gyroscope, accelerometer and magnetometer
You're all set, then.
This topic was automatically closed 180 days after the last reply. New replies are no longer allowed.