Hi All,
I have a few questions but thought I would post some photos of this project. First, I should mention that I really don't know what I am doing ![]() Actually this all started about one year ago when my son got a Lego NXT set. I've been playing with it ever since. I actually got an autonomous report to roam around the house for 43 minutes without getting stuck, a record.
Actually this all started about one year ago when my son got a Lego NXT set. I've been playing with it ever since. I actually got an autonomous report to roam around the house for 43 minutes without getting stuck, a record.
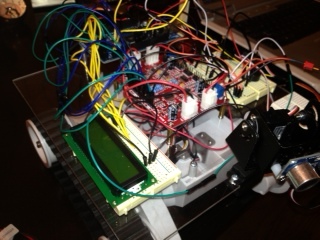
The filmy-ness of anything very large with Legos, however, as led to this affliction. It's a rover 5, dago motor controller, arduino Mega microcontroller and some breadboards, so far. The common Pin))) sensor is sitting atop a pan/tilt head from Sparkfun. At the top of the dowel is an HMC6352 breakout board. The compass wouldn't work without some seperation from the rest of electronics. I wired a LCD in thinking it would be helpful for bebugging, not really turning out to be that useful. Finally, I have written a simple library for the rover motors (RoverMotor.h), that allows them to run using NXT type parameters (-100 = full reverse, 100=full forward, 0=stopped. And the constructor allows you to predefine them as reversed.)
So a few questions:
I have made the libary so it's able to monitor the draw of the motors, but not read the encoders. Can somone explain the wiring for these? I get the black & red part ![]()
If I can get that piece working would anyone be interested in the RoverMotor library? I'm happy to share and/or collaborate.
Finally, can I drive the rover motors at something more like 8 or 9 volts? They say they are rated for 7.2 yet the dagu controller is good for 12. Curious if anyone has tried.
Best,
Greg