Hello everyone,
I'm working on a summer project provided by my school.
I want to build a 6 wheeled rover made of PVC pipes.
I will use six 12V DC Motors.
I'm a young Mechanical Engineer major, so I don't have too much experience with engineering hands on!
From my research, I believe using the L298N Driver is ideal for my project.
From my understanding, I will need three L298N Drivers, one L298N Driver for two DC Motors.
Is this correct?
Also I have an Arduino Uno but can get another Arduino if needed.
However I noticed that the Arduino can only support up to two L298N Drivers due to having two Ground ports, meaning I can only control 4 wheels?
I looked at many videos but only saw videos of 4 or 2 wheeled cars.
I'm not sure how to add more Ground ports unless I use the bread board but I don't have enough knowledge to really know how to utilize it.
Once I finish installing the wheels, I want to add wireless control to move the rover.
Then add in the Temperature and Humidity Sensor.
I added these additions to the topic to see if I can do it all in my Arduino Uno or if I need to upgrade to the Arduino Mega or of some sorts.
Thank you all!
EDIT:
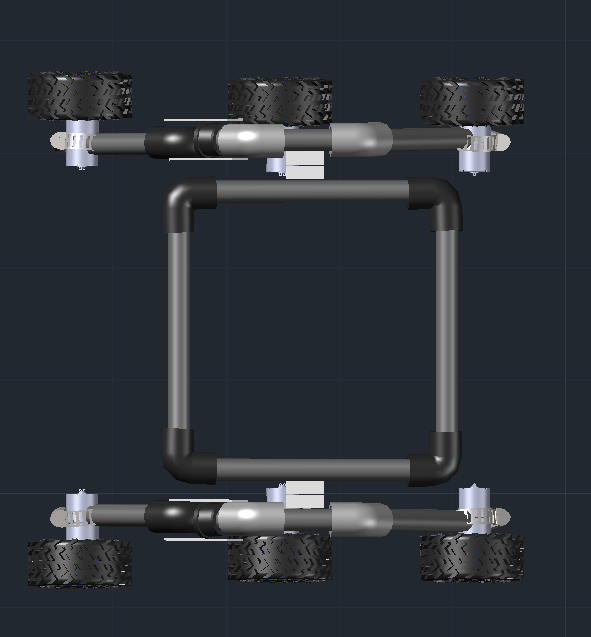
I have attached screenshots of a 3D model I pieced together on how I visualize the Rover:
As the Arduino ground connections are basically for signal ground, you can connect as many wires to the grounds as you need. Use stranded wire and wire nuts to connect the various wires together. If you don't like wire nuts, then solder the wires together.
How heavy? What batteries? What terrain? I'd go with a more robust, off the shelf motor driver set, honestly. You want to build something reliable? IMO, using L298N is asking for failure with motors that size for any actual practical purpose. 2A continuous per channel? At least that's what my cursory search turned up, maybe I'm wrong.
In bots I've built, I'd start at 25A per channel.
Hello Paul_KD7HB,
I been reading about connecting the wires to the grounds. I think I'll do that!
Do you know a video on how to to do that?
Doesn't have to be about 6 wheeled cars, I just want to see how people use stranded wire and wire nuts to connect to the the Arduino.
I can also solder, I have no problem with that!
For sure! I'm a big fan of a ground chassis lug terminated with crimped rings per device, items per device soldered somewhere close to make it easy to swap out new parts as I inevitably suffer from upgraditis.
If it ain't broke, you're not fixing it hard enough, I've seen one or three members in this forum state from time to time. That, and over optimization is the root of all evil. I'm frequently guilty of both.
Well, it's "supposed" to be a rover for Mars so I would say in rocky terrains, dry flooring with possible holes and cracks. But nothing crazy, I will just have it drive on garden soil, the beach, small back yard decorative pebbles.
My program said it doesn't have to be all the way authentic so it can be kinda like a hobbyist rover, since I'm just supposed to learn how to use arduino and have it interact with the hardware.
So it doesn't have to be too real, just make it work, haha.
I'm going with something like this with a similar size: How to Make a Mars Rover / Rocker bogie Robot - Stair climbing - YouTube
Here is his material list: Rocker bogie robot
I'm sure I'm headed for disaster, so I want to make it at least not blow up on my face.
Solder when you are sure this is the last wiring change. To use wire nuts, strip the wires and twist together, just like you were going to solder. Then use the correct size of wire nut and twist the wire nut onto the twisted wires. Ready to test.
Think of a car chassis ground, like when you jump the battery. One to battery +, the other somewhere on the bare metal chassis, ground. It's all tied to chassis ground, which is why you can test your battery voltage by meter on the + terminal and anywhere with exposed metal, same as jump starting it.
Sounds really cool! Just watch the weight. If it's a 12 volt system, look into RC car lipo batteries, used and charged safely, of course. Dimension Engineering makes some really nice motor drivers if that's in your budget. If you're light, you might look at these: https://www.dimensionengineering.com/products/sabertooth2x12
Best part of these drivers (I've used them successfully and they deliver for years, no problems at all, esp compared to the competition) is once this project is done, you can repurpose these for other potentially heavier projects.
I suggest you consider the TB6612FNG instead of the L298. It's a much newer device with much better output drive characteristics.
Physical wiring will be critical. You should make a single connection point for common (aka ground). Connect ALL your grounds to this one point. Keep the Arduino leads short (near the common point). This type of connection is referred to a "Star" grounding approach.
You should also keep the wires going to the motors physically away from the low signal wires of the Arduino. This will reduce the propensity of the motor generated electrical noise from effecting the Arduino operation.
I'm reading the description, and it says it can supply two DC brushed motors. I would need 3 of these for the 6 wheels, correct?
What kind of battery do you recommend?
My peers want it to be solar paneled, but I was going to use a battery first to make sure all goes well with the wheels.
I might not do solar panels if it gets too complex.
3S lipo, 5000mAh if you go lipo, but you'd need a proper charger, too. It adds up quickly, so you might go 2x12V SLA, 5Ah, wired in parallel if you need good runtime before recharging. Plus, these would be easier to trickle recharge using solar, stay away from AGM (auto glass mat) if you go SLA. If it's strictly to run long enough for school to make grade, 1x12V SLA, 5Ah ought to do it. The sort used as battery backup in fire alarm control panels in apartment buildings, things like that.
Almost certainly not. The ancient, inefficient L298 can handle at most 1 Ampere per channel, wasting approximately 1/3 of the 12V battery energy as heat in the process.
Pololu has an excellent selection of modern, efficient motor drivers. Pick one that can handle the total stall current (look it up) of your motors.
Pololu's motor drivers are remarkably well protected from meltdown, which suggests to me that you violated the driver specs (voltage supply too high, for example).
Thank you, that's why I was hesitant to get those drivers.
There were a lot of videos with them so I was almost sure to get them but I figured I should ask first.