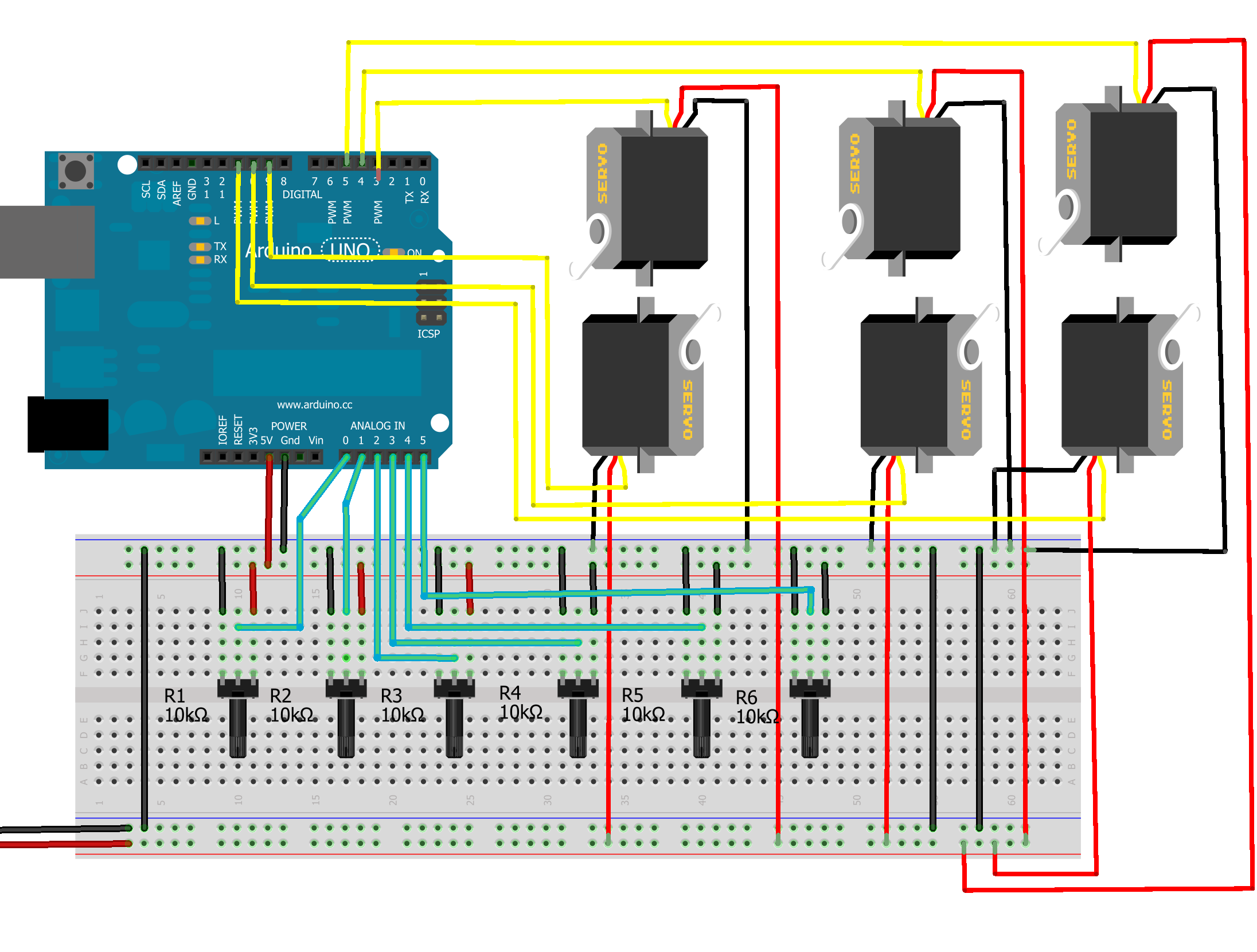
Seing if this JPEG file stays attatched, This is the picture of my wiring...
I used 50k potentiometers instead(cos thats what i had) of the 10k sugested.
And with that code sketch that Robin2 fixed up for me it all works perfectly.
Im blown away iv managed to actuly compleete a arduino project i customised to suit me.
All my parts iv made by hand my self, And once its all assembeled i shall post some more pics of it all together.
I realy want to get it all on a prototype board tho.
I have seen somewere that the external power source coming in should run through a "voltage regulator and then a capacitor of some sort, And then branch of at the capacitor to connect other servos..(ill look for of picture of it aswell).