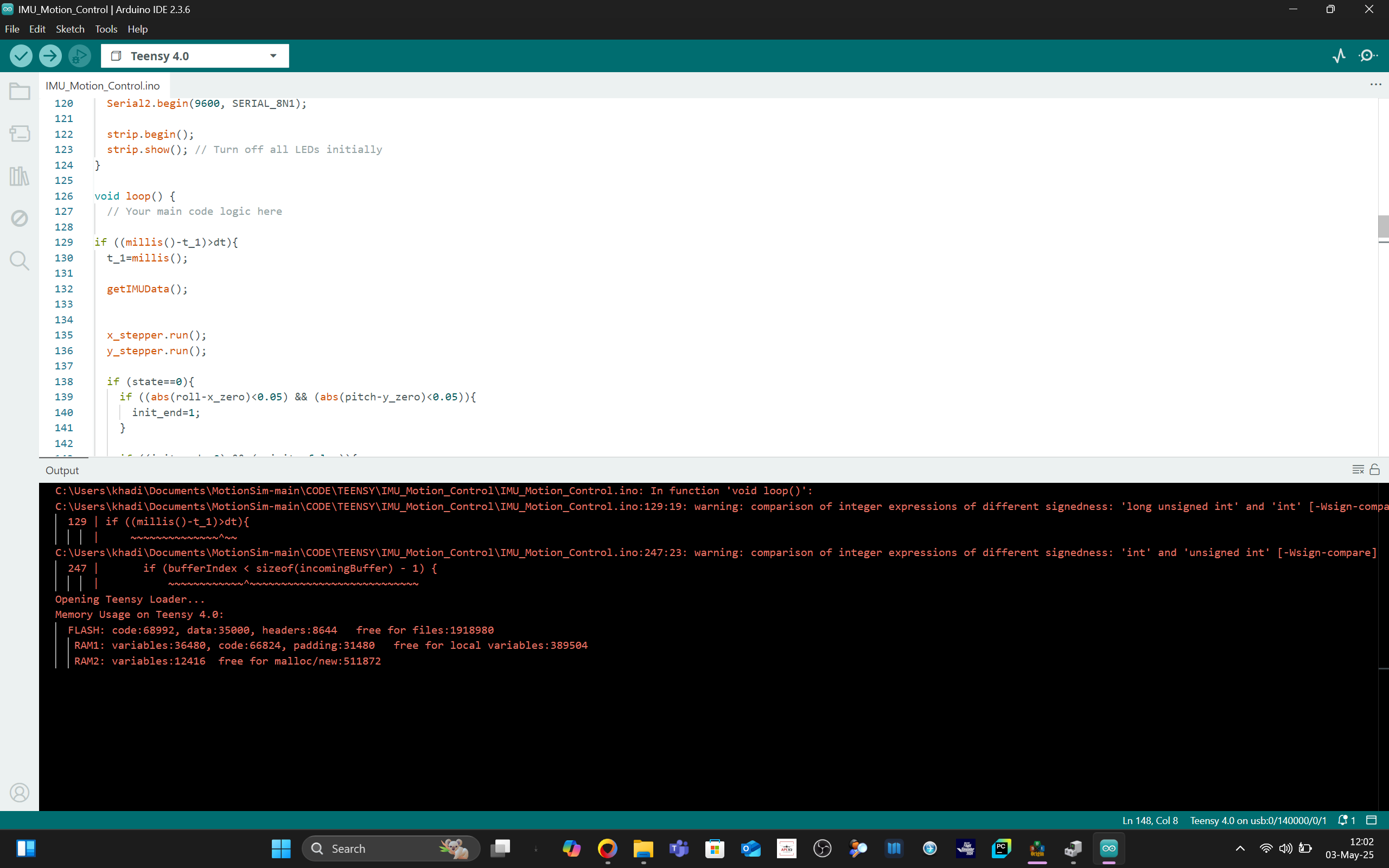
hey guys i have tried compiling this code but am having these two warnings comparison of integer expressions of different signedness and not sure how to resolved this any help correcting this code would be appreciated

Please don't hijack forum topics @calli592. I have split your post out to its own topic.
Hijacking is against the Arduino forum rules. The reason is that it may sidetrack the discussion, even preventing the creator of the topic from getting the assistance they need. It also reduces your own chances of getting assistance.
This is basic forum etiquette, as explained in the "How to get the best out of this forum" guide. It contains a lot of other useful information. Please read it.
Thanks in advance for your cooperation.
Hi! Welcome to The Forum.
+1 to read "How to get the best out of this Forum". It says, for example, to post your whole code instead of a picture of a snippet.
Anyway, I would take a look in the type of the variables t_1, dt, bufferIndex and incomingBuffer.
millis(), for example, returns an unsigned long. What types does t_1 and dt have?
From file...
#include <AccelStepper.h>
#include <Adafruit_NeoPixel.h>
// Define the stepper motor connections
#define XDIR_PIN 3
#define XSTEP_PIN 2
#define YDIR_PIN 5
#define YSTEP_PIN 4
#define PASSTHROUGH_PIN 16
#define LED_PIN 6
#define NUM_LEDS 5
// Define the maximum speed and acceleration
#define MAX_SPEED 10000.0 // Steps per second
#define ACCELERATION 10000.0 // Steps per second^2
#define HISTORY_SIZE 10
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_NeoPixel strip(NUM_LEDS, LED_PIN, NEO_GRB + NEO_KHZ800);
Adafruit_MPU6050 mpu;
float pitch=0;
float roll=0;
float pitch_1=0;
float roll_1=0;
float init_start;
int init_end=0;
int step_size;
float MOTION_MULT = 100.0;
// Create a new instance of the AccelStepper class
AccelStepper x_stepper(AccelStepper::DRIVER, XSTEP_PIN, XDIR_PIN);
AccelStepper y_stepper(AccelStepper::DRIVER, YSTEP_PIN, YDIR_PIN);
// Variables to track target position and whether motor is moving
//long targetPosition = 0;
int state=0;
bool x_isMoving = false;
bool y_isMoving = false;
bool x_init=false;
bool y_init=false;
int x_zero=0;
int y_zero=-4;
int x_pos=0;
int y_pos=0;
int steps_per_rev=1600;
int roll_raw;
int pitch_raw;
int roll_scaled;
int pitch_scaled;
int x_pot_loc;
int y_pot_loc;
int minPos = -8000;
int maxPos = 8000;
long t_1=0;
int dt=10;
byte i=0;
int LED_ANI_COUNT = 0;
float num1 = 0.0;
float num2 = 0.0;
String inputString = "";
boolean stringComplete = false;
// Buffer to hold incoming data
float receivedData[3];
char incomingBuffer[50];
int bufferIndex = 0;
// Variables to keep track of the conversion status
void setup() {
// Set the maximum speed and acceleration
pinMode(XDIR_PIN,OUTPUT);
pinMode(YDIR_PIN,OUTPUT);
pinMode(XSTEP_PIN,OUTPUT);
pinMode(YSTEP_PIN,OUTPUT);
pinMode(PASSTHROUGH_PIN,INPUT_PULLUP);
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
x_stepper.setMaxSpeed(MAX_SPEED);
y_stepper.setMaxSpeed(MAX_SPEED);
x_stepper.setAcceleration(ACCELERATION);
y_stepper.setAcceleration(ACCELERATION);
// Set the initial position to 0
x_stepper.setCurrentPosition(0);
y_stepper.setCurrentPosition(0);
// Set the direction to clockwise
x_stepper.setSpeed(MAX_SPEED/2);
y_stepper.setSpeed(MAX_SPEED/2);
Serial2.begin(9600, SERIAL_8N1);
strip.begin();
strip.show(); // Turn off all LEDs initially
}
void loop() {
// Your main code logic here
if ((millis()-t_1)>dt){
t_1=millis();
getIMUData();
x_stepper.run();
y_stepper.run();
if (state==0){
if ((abs(roll-x_zero)<0.05) && (abs(pitch-y_zero)<0.05)){
init_end=1;
}
if ((init_end==0) && (x_init==false)){
step_size=abs(roll-x_zero)*10;
step_size=min(step_size,10);
if (((roll-x_zero)>0) && (x_isMoving==false)){
x_pos-=step_size;
}
if (((roll-x_zero)<0) && (x_isMoving==false)){
x_pos+=step_size;
}
moveToPosition(x_pos,y_pos);
x_stepper.run();
y_stepper.run();
updateMovement();
}
else{
x_init=true;
x_stepper.setCurrentPosition(0);
x_pos=0;
}
if ((init_end==0) && (y_init==false)){
step_size=abs(pitch-y_zero)*10;
step_size=min(step_size,10);
if (((pitch-y_zero)>0) && (y_isMoving==false)){
y_pos+=step_size;
}
if (((pitch-y_zero)<0) && (y_isMoving==false)){
y_pos-=step_size;
}
moveToPosition(x_pos,y_pos);
x_stepper.run();
y_stepper.run();
updateMovement();
}
else{
y_init=true;
y_stepper.setCurrentPosition(0);
y_pos=0;
}
if (LED_ANI_COUNT>NUM_LEDS-1){
LED_ANI_COUNT=0;
}
for (int i = 0; i < NUM_LEDS; i++) {
strip.setPixelColor(i, strip.Color(0, 0, 0)); // Blue: Red=0, Green=0, Blue=255
}
strip.setPixelColor(LED_ANI_COUNT, strip.Color(255, 255, 0)); // Blue: Red=0, Green=0, Blue=255
strip.show();
LED_ANI_COUNT++;
if ((x_init==true) && (y_init==true)){
state=2;
}
Serial.print("Pitch: ");
Serial.print(pitch);
Serial.print(" ");
Serial.print("Roll: ");
Serial.print(roll);
Serial.print(" ");
Serial.print("x_pos: ");
Serial.print(x_pos);
Serial.print(" ");
Serial.print("y_pos: ");
Serial.print(y_pos);
Serial.print(" ");
Serial.print(init_end);
Serial.println("");
//updateMovement();
}
else if (state==1){
for (int i = 0; i < NUM_LEDS; i++) {
strip.setPixelColor(i, strip.Color(0, 0, 255)); // Blue: Red=0, Green=0, Blue=255
}
strip.show();
while (Serial2.available()) {
char incomingByte = Serial2.read();
// Check for end-of-message marker
if (incomingByte == '\n') {
incomingBuffer[bufferIndex] = '\0'; // Null-terminate the string
bufferIndex = 0;
// Parse the incoming data
sscanf(incomingBuffer, "%f,%f,%f", &receivedData[0], &receivedData[1], &receivedData[2]);
// Print the received data for debugging
// Serial.print("Received: ");
// Serial.print(receivedData[0]);
// Serial.print(", ");
// Serial.print(receivedData[1]);
// Serial.print(", ");
// Serial.println(receivedData[2]);
x_pos=map(receivedData[0],1000,2000,minPos,maxPos);
y_pos=map(receivedData[1],2000,1000,minPos,maxPos);
} else {
// Append the byte to the buffer
if (bufferIndex < sizeof(incomingBuffer) - 1) {
incomingBuffer[bufferIndex++] = incomingByte;
}
}
}
if (digitalRead(PASSTHROUGH_PIN)==1){
state=2;
}
}
else if (state==2){
for (int i = 0; i < NUM_LEDS; i++) {
strip.setPixelColor(i, strip.Color(0, 255, 0)); // Blue: Red=0, Green=0, Blue=255
}
strip.show();
if (digitalRead(PASSTHROUGH_PIN)==0){
state=1;
}
if (stringComplete) {
parseVector(inputString);
inputString = "";
stringComplete = false;
x_pos=num1*MOTION_MULT;
y_pos=num2*MOTION_MULT;
}
// Read serial input and build the input string
while (Serial.available()) {
char inChar = (char)Serial.read();
inputString += inChar;
// Check if the input string is complete (ends with a newline character)
if (inChar == '\n') {
stringComplete = true;
break;
}
}
}
Serial.println(state);
//Serial.print(" X: ");
//Serial.print(x_pot_loc);
//Serial.print(" Y: ");
//Serial.print(y_pot_loc);
//Serial.print(" XPos ");
//Serial.print(pitch_scaled);
//Serial.print(" Ypos ");
//Serial.println(roll_scaled);
}
moveToPosition(x_pos,y_pos);
x_stepper.run();
y_stepper.run();
updateMovement();
}
void moveToPosition(long xposition,long yposition) {
// Move to the specified position
x_stepper.moveTo(xposition);
y_stepper.moveTo(yposition);
x_isMoving = true;
y_isMoving = true;
}
void updateMovement() {
// Check if the stepper motor has reached the target position
if (x_isMoving && x_stepper.distanceToGo() == 0) {
x_isMoving = false;
}
if (y_isMoving && y_stepper.distanceToGo() == 0) {
y_isMoving = false;
}
}
void parseVector(String input) {
// Remove the newline character from the input string
input.trim();
// Find the comma separating the two numbers
int commaIndex = input.indexOf(',');
if (commaIndex > 0) {
// Extract the first and second number as substrings
String num1Str = input.substring(0, commaIndex);
String num2Str = input.substring(commaIndex + 1);
// Convert the substrings to floats
num1 = num1Str.toFloat();
num2 = num2Str.toFloat();
// Print the numbers to the Serial Monitor for verification
Serial.print("Received: ");
Serial.print(num1);
Serial.print(", ");
Serial.println(num2);
}
}
void getIMUData(){
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
float ax = a.acceleration.x;
float ay = a.acceleration.y;
float az = a.acceleration.z;
// Calculate pitch and roll
pitch = atan2(-ax, sqrt(ay * ay + az * az)) * 180.0 / PI;
roll = atan2(ay, az) * 180.0 / PI;
pitch=pitch*0.1+pitch_1*0.9;
roll=roll*0.1+roll_1*0.9;
pitch_1=pitch;
roll_1=roll;
}
Resource:
1 Like