Hello guys,
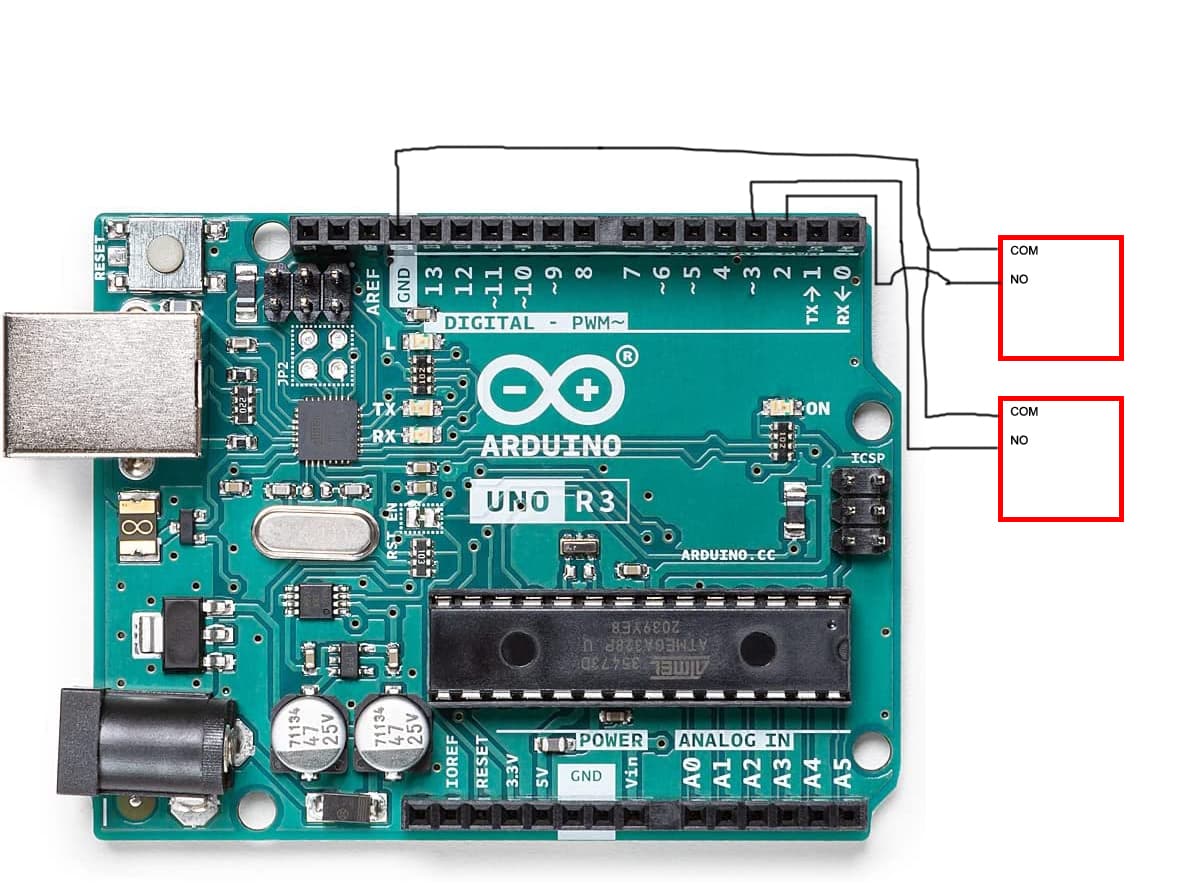
I'm using Arduino UNO with an ethernet shield to read relay values. I'm using the internal pull up resistors and passing ground from the board to the relay contacts to read the returns.
This seems to be very unstable and reliable and has a latency of about 2 seconds. I thought initially that the delay was added when reading the TCP packets but I was able to verify through serial monitor that this is not the case.
My code is very simple and my ethernet shield is Arduino certified (no knock off hardware used):
#include <SPI.h>
#include <Ethernet.h>
#define DEBUG_MODE 1
static const int pin_S0 = 2;
static const int pin_S1 = 3;
static const int pin_S2 = 4;
static const int pin_S3 = 5;
// Set values below to match your network needs:
byte MAC[] = {0x90, 0xA2, 0xDA, 0x00, 0xD7, 0xFC}; // MAC Address
byte IP[] = {192, 168, 1, 17}; // Network Address
byte gateway[] = {192, 168, 1, 1}; // Gateway Address
byte subnet[] = {255, 255, 255, 0}; // Subnet Mask
EthernetServer server(80); // Set Server Port
EthernetClient client; // Define client
const int MAX_LEN = 10; // Maximum length of a command
static int c = 0;
char command[MAX_LEN];
char response[MAX_LEN];
char state[4];
void setup()
{
#ifdef DEBUG_MODE
Serial.begin(9600);
#endif
Ethernet.begin(MAC, IP, gateway, subnet);
server.begin();
//Set up input pins as active low using internal pullup
pinMode(pin_S0,INPUT_PULLUP);
pinMode(pin_S1,INPUT_PULLUP);
pinMode(pin_S2,INPUT_PULLUP);
pinMode(pin_S3,INPUT_PULLUP);
}
void loop()
{
char inByte;
client = server.available();
if(client){
inByte = client.read();
switch (inByte)
{
case 13: //CR: process the command
command[c] = 0; //Make the current position a terminating null byte
receiveTCP(command); //Process the command
c = 0; //Reset counter for next time
break;
case 10: //LF
break;
default:
if (c < (MAX_LEN - 1)){
command[c] = inByte;
c++;
}
break;
}
}
}
void receiveTCP(char* command)
{
int relay = command[2] - '0';
char response[4] = "[0]";
//Read inputs and invert
state[0] = !digitalRead(pin_S0);
state[1] = !digitalRead(pin_S1);
state[2] = !digitalRead(pin_S2);
state[3] = !digitalRead(pin_S3);
if(command[1] != 'S' || relay >= 4)
{
#ifdef DEBUG_MODE
Serial.println(response);
#endif
return;
}
response[1] = (state[relay] == 0) ? 48 : 49;
#ifdef DEBUG_MODE
Serial.println(response);
#endif
client.println(response);
}
Any thoughts on what could be the cause of this? Could it be that the internal pull up resistors are not reliable?
Cheers!