Hi there,
I am new there, and I have some experience with some easy applications with my arduino uno/mega/nanos.
No problems reading an incremental encoder.
Now I would like to use an absolute encoder reading the absolute position of an axis of my optical bank.
No CNC, milling stuff. No sophisticated circuits, only the visualisation of an position, e.g. in serial monitor, later on with a LCD - but this can be excluded here, I think that is not the big problem for me.
So, now I have ordered a 12 BIT absolute encoder with rare information.
It is a magnetic encoder: BRT38-SOM-4096-RT1
360 Degree, non-contact
UPC: 781573936858
EAN: 0781573936858
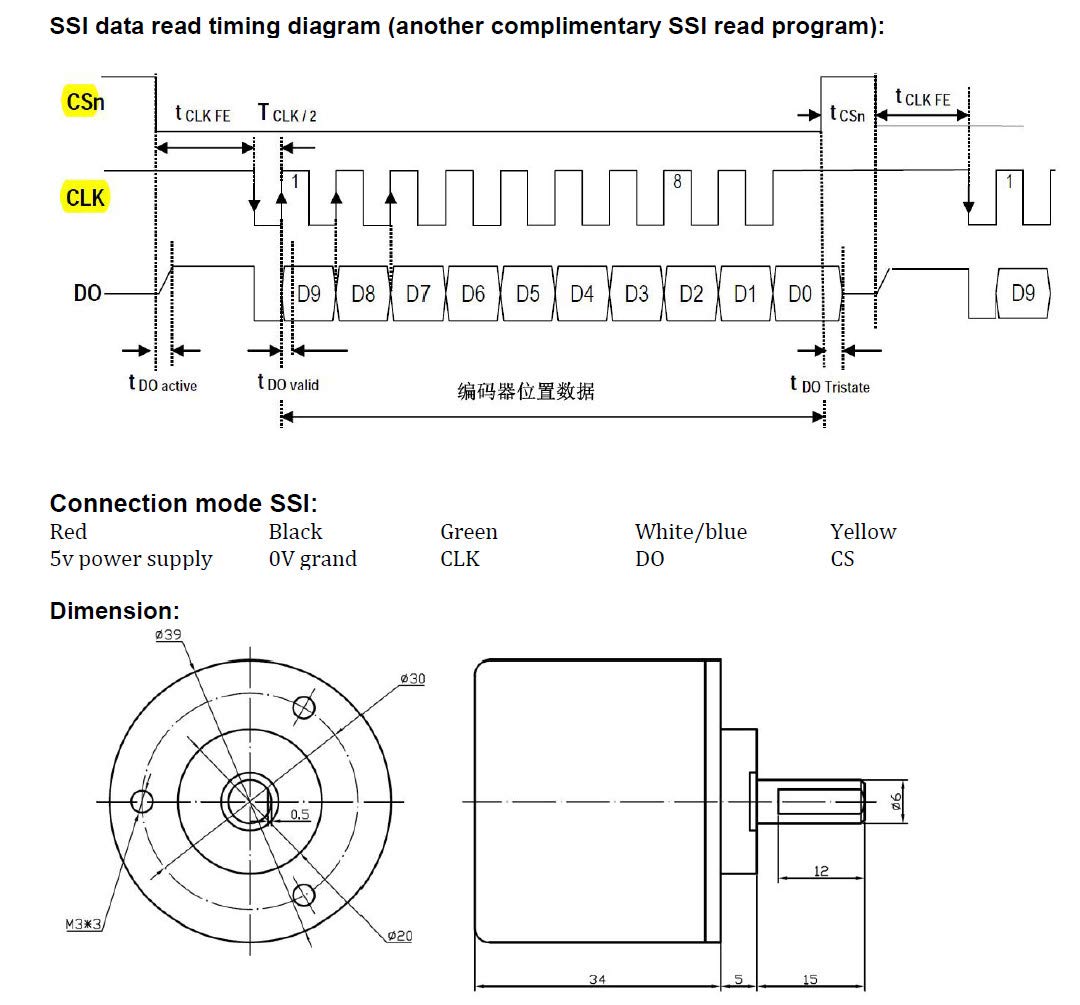
Connection: Red=VCC, Black = 0V, Green =Input CLK, Blue= Output DO, Yellow = Input CS
For the first time I would be happy if someone can tell me, if there are risks for damaging the encoder (I have only one item ordered). e.g. PULLUP for the digital input of the arduino via DO from the encoder.
After searching the net, I found out, that CLK is the CLOCK Signal, an Input to the encoder,
CS an Input to the encoder, too.
DO is the digital output of the encoder, right?
A little bit confusing is the fact, that I read, that I can put it directly to the Arduino, and on the other hand, I need an interface to connect between the encoder and the arduino.
Can you please help me starting on with some code and healthy hints for my hardware?
In the attachment are two images, from the encoder and the info sheet with technical drawing of the signal.
Best regards,
Matthias