Hi. i have a problem that step motor direction does not change.
-
Windows 11
-
Arduino IDE 2.3.2
-
Accelstepper library 1.64
-
LSM-NK174218-1605 step motor
-
SBD-10 motor driver
-
Arduino due
operating mechanism :
void Left_To_Grasping_Position();
x axis : 20mm downward
z axis : 20mm leftward
void Left_Pickup();
x axis : leftward
z axis : upward
void Left_Turn();
x axis : rightward
z axis : downward
void Left_Escape();
x axis : 20mm rightward
z axis : 10mm downward
** problem:
motor direction does not change.
- in pickup stage, z axis motor continuously move downward.
- in turn stage, x axis motor continuously move leftward.
what i've tried :
- change hardware components( Arduino, Arduino I/O pin position, bread board, connecting cable, motor driver, motor....etc)
- adjust value types( ex. int -> long)
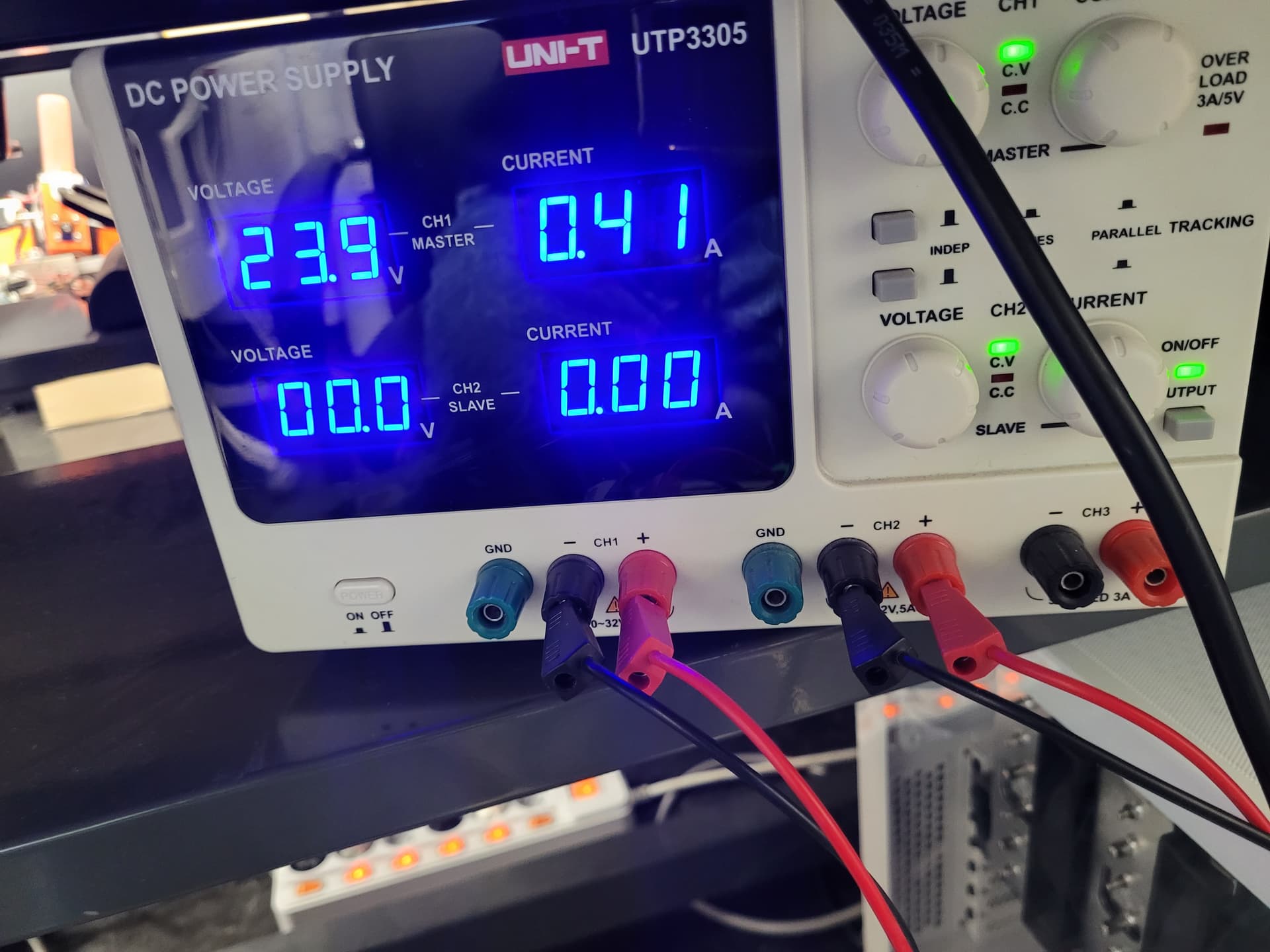
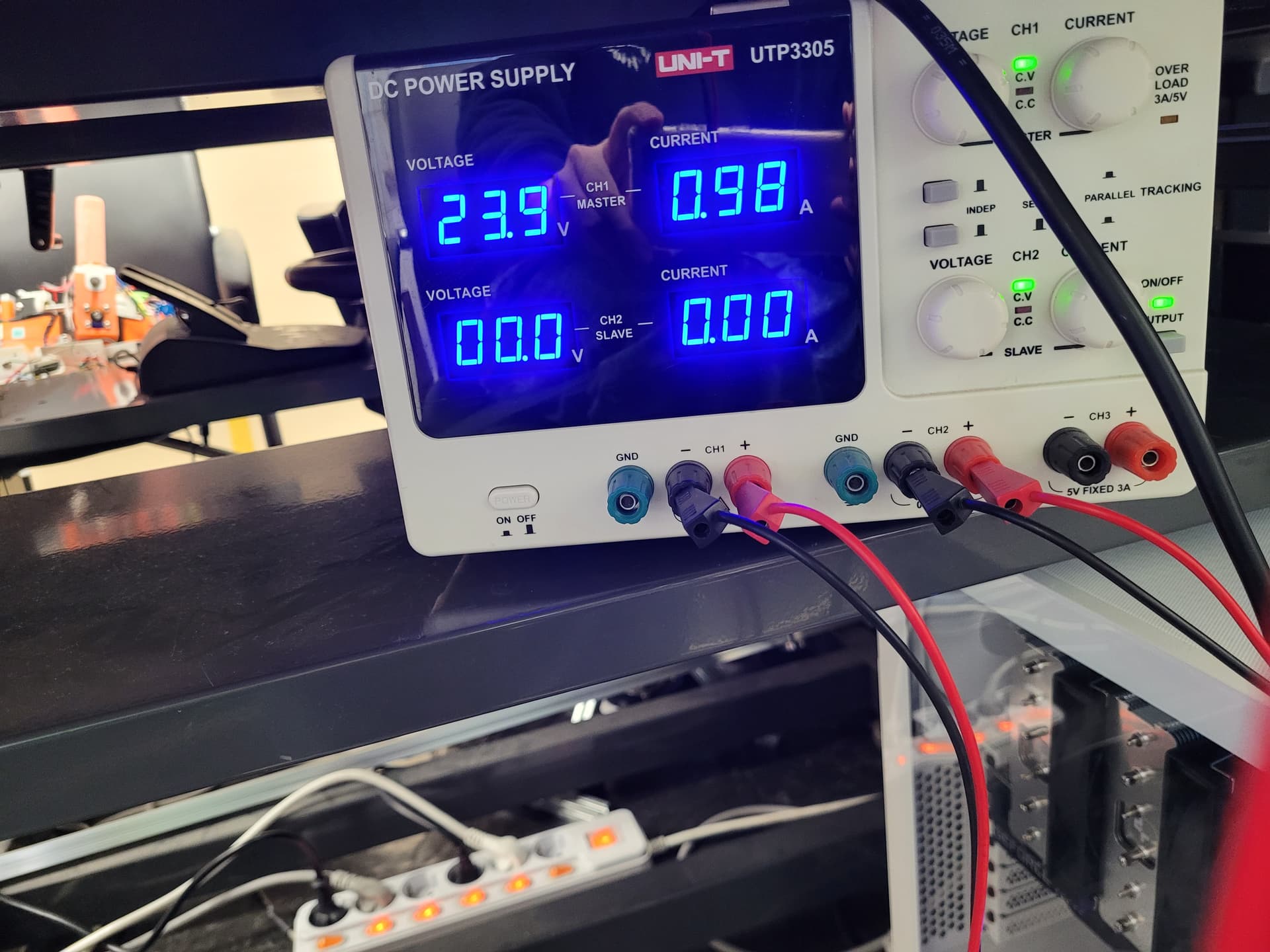
- adjust DC power supply 10~24V
- use pinMode-digitalWrite algorithm( dir . low <-> high)
instead of using accelstepper library
my code :
#include <AccelStepper.h>
#include <MultiStepper.h>
#define LX_ENA 2 // 3200 10mm
#define LX_PUL 4
#define LX_DIR 3
#define LZ_ENA 5 //
#define LZ_PUL 7
#define LZ_DIR 6
#define INI_XPOSITION -20 //PickUp coord
#define INI_ZPOSITION -20
#define INI_GPOSITION 800
#define N 40
#define N2 14 //(L_Follow-1)/Weaving_x
#define N3 14 //(R-Follow-1)/Weaving_x
#define PR 40
#define PR2 26
#define L_LSR 39
#define R_LSR 38
#define L_LEAN 6.7
#define R_LEAN 5.5
long lxpPositions[N+1]; //PickUp arrays
long lzpPositions[N+1];
long lgpPositions[N+1];
long lxtPositions[N+1]; //PickUp Turn arrays
long lztPositions[N+1];
long lgtPositions[N+1];
long positions[2];
long Last_lxPosition = 0;
long Last_lzPosition = 0;
long Last_lgPosition = 0;
AccelStepper stepper1(AccelStepper::DRIVER, LX_PUL, LX_DIR);
AccelStepper stepper2(AccelStepper::DRIVER, LZ_PUL, LZ_DIR);
MultiStepper steppers;
void Left_To_Grasping_Position();
void Left_Pickup();
void Left_Turn();
void Left_Escape();
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
Serial.begin(115200);
//////////////////////////////////////////////
stepper1.setMaxSpeed(3200);
stepper2.setMaxSpeed(3200);
///////////////////////////////////////////////
steppers.addStepper(stepper1);
steppers.addStepper(stepper2);
///////////////////////////////////////////////
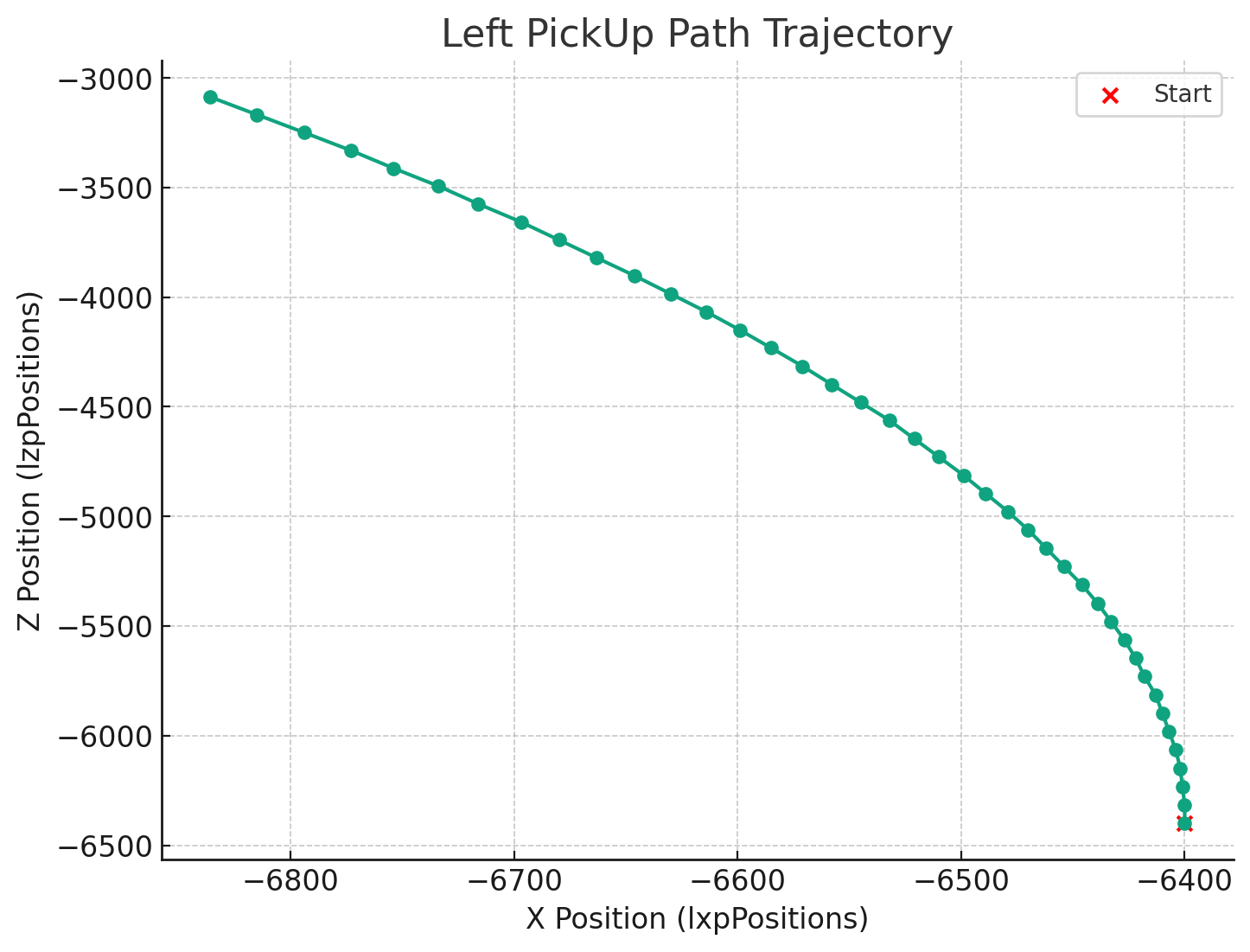
for (int i=0;i<N+1;i++) //Generate Left PickUp Path
{
lxpPositions[i] = INI_XPOSITION*1600/5 -1*round(1600/5*(PR-PR*cos(2*PI/360*15/N*i)));
lzpPositions[i] = INI_ZPOSITION*1600/5 +1*round(1600/5*PR*sin(2*PI/360*15/N*i));
lgpPositions[i] = INI_GPOSITION - 1*round(3200/360*15/N*i);
}
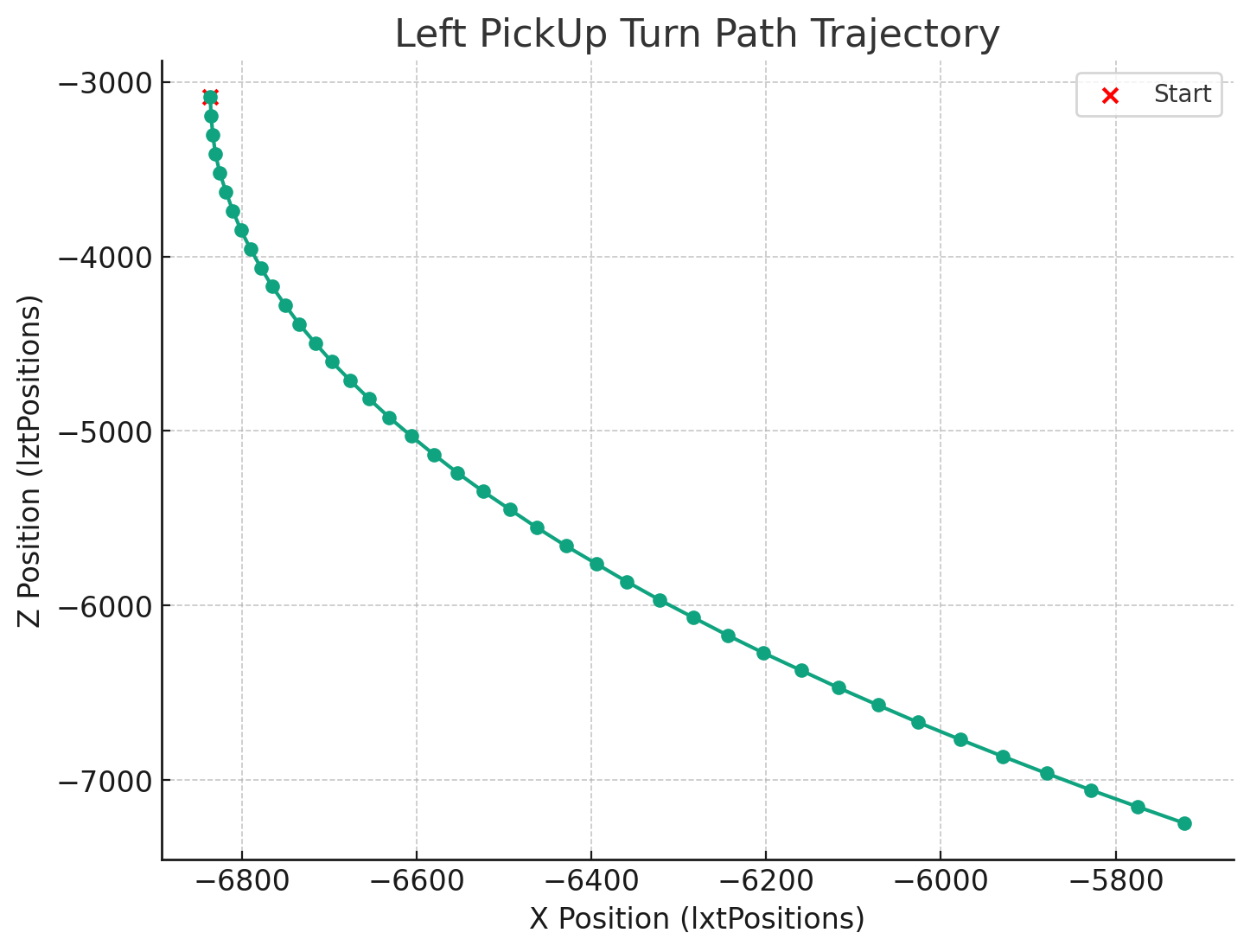
for (int i=0;i<N+1;i++) //Generate Left PickUp Turn Path
{
lxtPositions[i] = lxpPositions[N]+1*round(1600/5*(PR2-PR2*cos(2*PI/360*30/N*i)));
lztPositions[i] = lzpPositions[N]-1*round(1600/5*(PR2)*sin(2*PI/360*30/N*i));
lgtPositions[i] = lgpPositions[N] + 1*round(3200/360*32/N*i);
}
//////////////////////////////////////////////////
char s = 'n';
while(1)
{
s=Serial.read();
if(s=='q')
{
break;
}
}
Left_To_Grasping_Position();
Serial.println("Left_To_Grasping_Position() complete");
while(1)
{
s=Serial.read();
if(s=='w')
{
break;
}
}
delay(500);//
Left_PickUp();
Serial.println("Left_PickUp() complete");
while(1)
{
s=Serial.read();
if(s=='e')
{
break;
}
}
delay(500);
Left_Turn();
Serial.println("Left_Turn() complete");
while(1)
{
s=Serial.read();
if(s=='r')
{
break;
}
}
delay(500);
Left_Escape();
Serial.println("Left_Escape() complete");
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
}
void Left_To_Grasping_Position(){
positions[0] = 0;
positions[1] = 0;
steppers.moveTo(positions);
steppers.runSpeedToPosition();
positions[0] = 0;
positions[1] = INI_ZPOSITION*1600/5; // -20*1600/5 = -6400, z axis 20mm downward
steppers.moveTo(positions);
steppers.runSpeedToPosition();
positions[0] = INI_XPOSITION*1600/5; // -6400 , x axis 20mm leftward
positions[1] = INI_ZPOSITION*1600/5; // -6400
steppers.moveTo(positions);
steppers.runSpeedToPosition();
}
void Left_PickUp(){
for(int Flag = 0;Flag<N+1;Flag++)
{
positions[0] = (lxpPositions[Flag]);
positions[1] = (lzpPositions[Flag]);
steppers.moveTo(positions);
steppers.runSpeedToPosition();
}
}
void Left_Turn(){
for(int Flag = 0;Flag<N+1;Flag++)
{
positions[0] = (lxtPositions[Flag]);
positions[1] = (lztPositions[Flag]);
steppers.moveTo(positions);
steppers.runSpeedToPosition();
}
}
void Left_Escape(){
positions[0] = (lxtPositions[N]+20*1600/5);
positions[1] = (lztPositions[N]-10*1600/5);
steppers.moveTo(positions);
steppers.runSpeedToPosition();
}
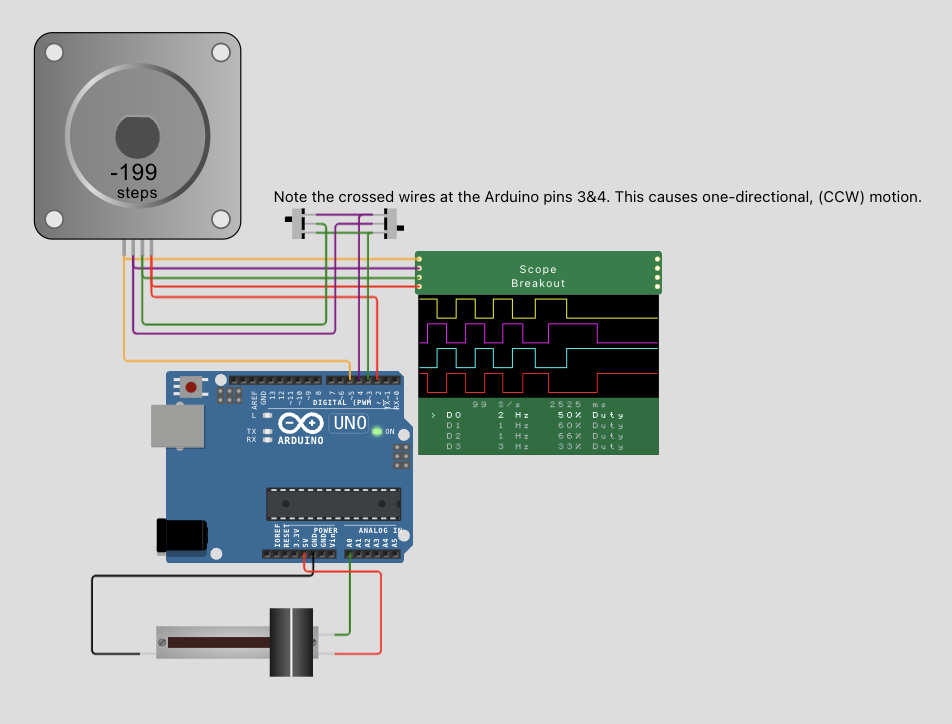
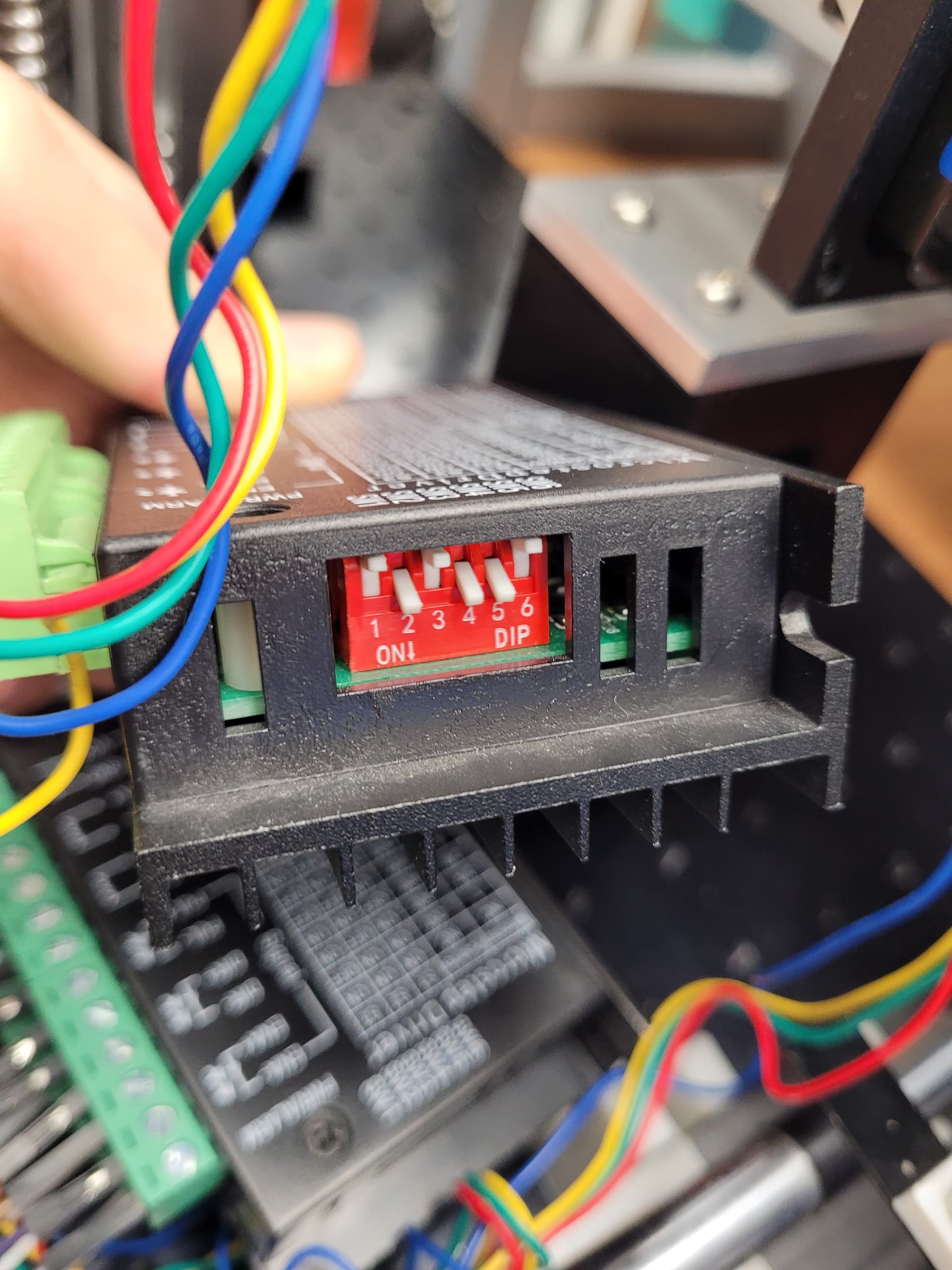
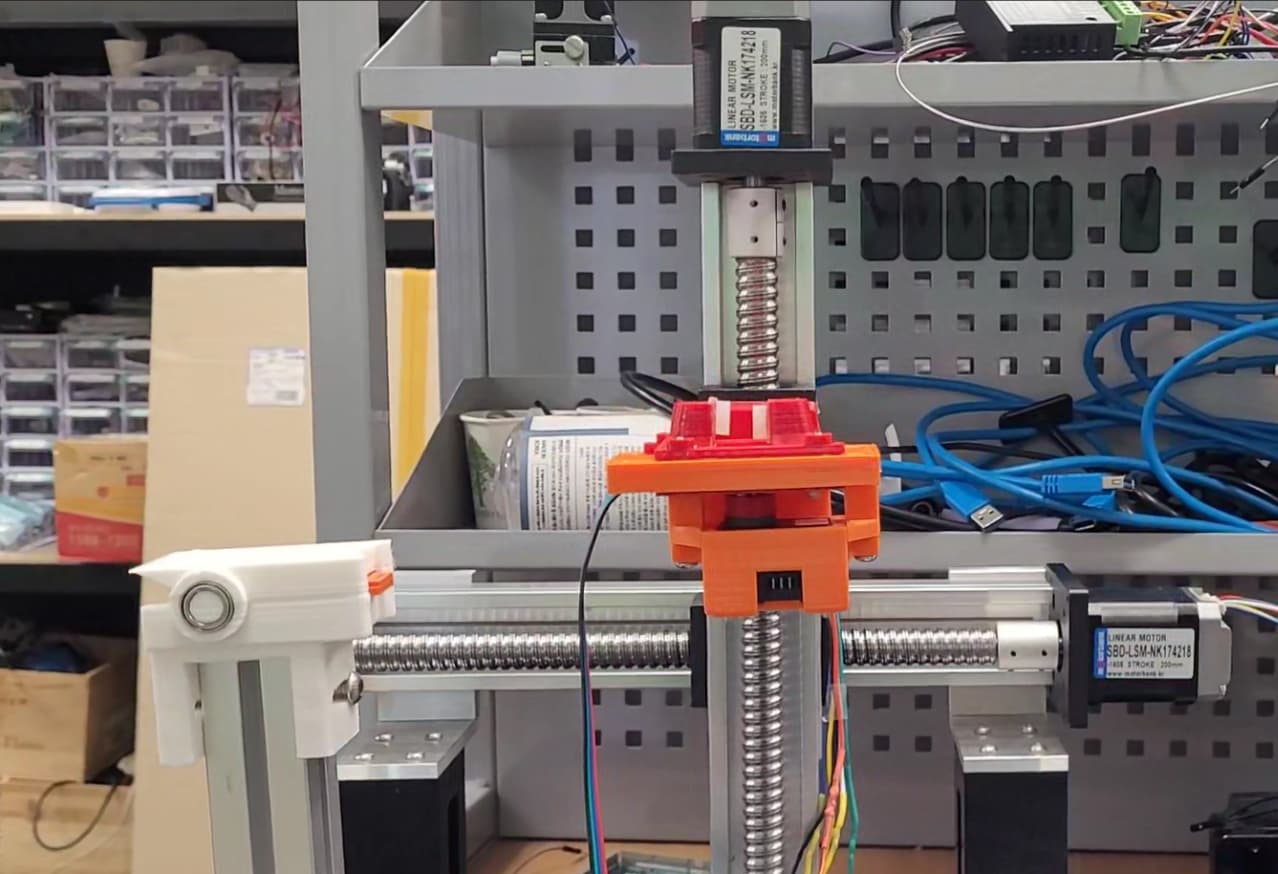
operating picture:
after operating, serial output is good.
thank you very much for you guys' support!!