I need to build a system to shutter laser beams at different points on a single table. We're thinking between ten and twenty points. The motors would move a very lightweight metal strip into and out of the beam path, through only a few millimeters. It's for troubleshooting, so motions will all be manually switched on and off and won't be in extremely quick succession. We're looking to have a program, probably in LabVIEW, such that we can click on and off the individual shutters all from one screen.
So after some research, I think it makes sense to use stepper motors (rather than servos), connected through a breadboard with an H-bridge to an Arduino Mega controller. I'm totally new to designing electronic systems, am I on the right track? Is there anything more I should be aware of or plan for while ordering hardware? I expect to have programming-related questions, but that'll be another forum topic.
How precise does the positioning have to be? Shutters mean, to me, an open or closed state or 2 positions. A solenoid would make more sense in that case. One pin and a transistor driver for each solenoid.
We may need to adjust the position if we move the beam. I'm not sure how much that change would be. Is it much easier to build and program a system using solenoids? Which sorts of solenoids would work for this? I can visualize the design with stepper motors but I'm less clear on solenoids.
For simplicity I would suggest solenoids with the lightweight metal strip having mechanical stops in both positions. This will reduce the software development dramatically over the use of steppers and simplify the calibration. Also there is no step tolerance to work with. This response is to help you get started in solving your problem, not solve it for you.
Good Luck & Have Fun!
Gil
Actually, the description of a lightweight metal shutter strongly suggests the use of servos. Why would you think otherwise?
If you use steppers, you either have to drive them against a stop or have an optical sensor to determine the end position which you need to verify every time your turn them on.
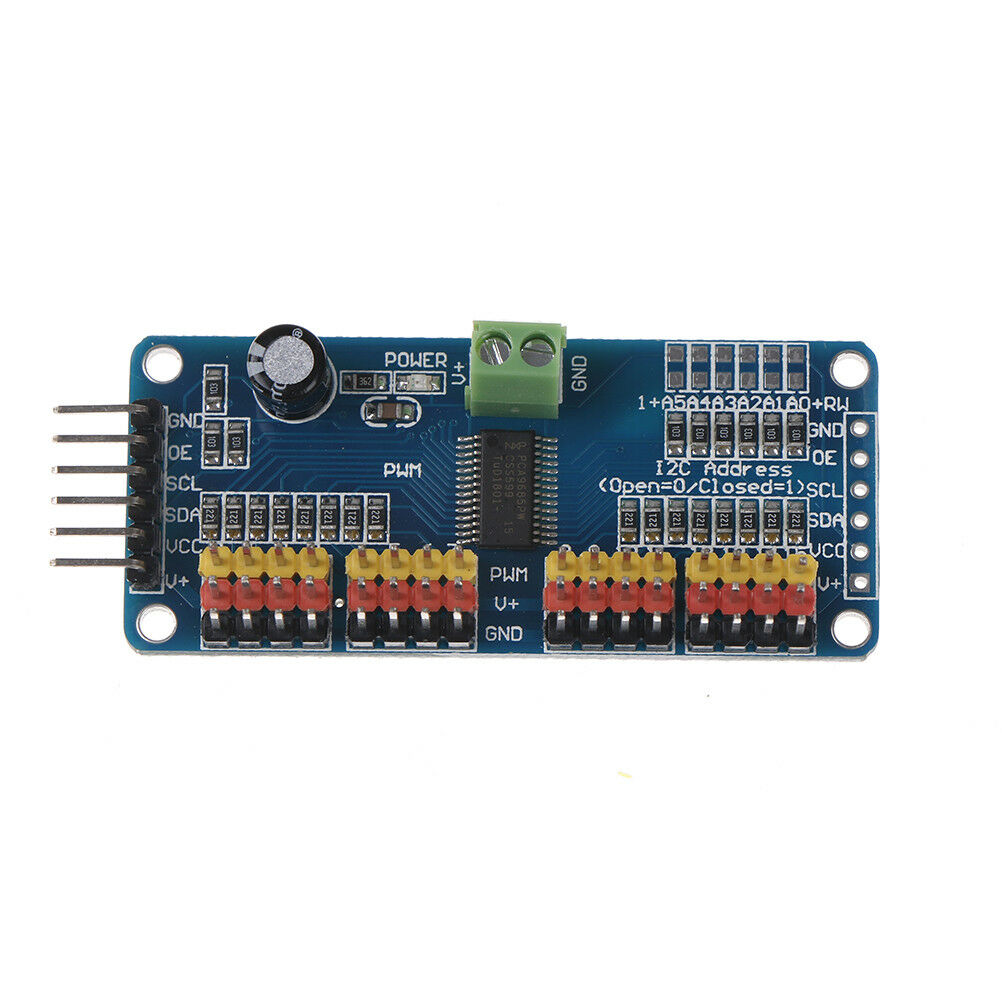
For servos, you use these 16-0utput driver boards: