Hey thanks for the reply I mixed ur code with a code from a tutorial on the internet and made these codes
transmitter:
// SimpleTx - the master or the transmitter
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#define CE_PIN 9
#define CSN_PIN 10
const byte slaveAddress[5] = {'R','x','A','A','A'};
RF24 radio(CE_PIN, CSN_PIN); // Create a Radio
struct dataStruct {
byte valX; // The Joystick position values
byte valY;
byte valSW;
byte valX2;
byte valY2;
byte valSW2;
};
dataStruct myData;
unsigned long currentMillis;
unsigned long prevMillis;
unsigned long txIntervalMillis = 50; // send once per second
void setup() {
Serial.begin(9600);
Serial.println("SimpleTx Starting");
radio.begin();
radio.setDataRate( RF24_250KBPS );
radio.setRetries(3,5); // delay, count
radio.openWritingPipe(slaveAddress);
myData.valX = 127;
myData.valY = 127;
myData.valSW = 0;
myData.valX2 = 127;
myData.valY2 = 127;
myData.valSW2 = 0;
}
//====================
void loop() {
GetJoyValues();
currentMillis = millis();
if (currentMillis - prevMillis >= txIntervalMillis) {
send();
prevMillis = millis();
}
}
//====================
void GetJoyValues(){
myData.valX = map( analogRead(A0), 0, 1024, 0, 255);
myData.valY = map( analogRead(A1), 0, 1024, 0, 255);
myData.valSW = digitalRead(2);
myData.valX2 = map( analogRead(A2), 0, 1024, 0, 255);
myData.valY2 = map( analogRead(A3), 0, 1024, 0, 255);
myData.valSW = digitalRead(4);
}
void send() {
bool rslt;
rslt = radio.write( &myData, sizeof(myData) );
// Always use sizeof() as it gives the size as the number of bytes.
// For example if dataToSend was an int sizeof() would correctly return 2
Serial.print("Data Sent ");
if (rslt) {
Serial.println(" Acknowledge received");
}
else {
Serial.println(" Tx failed");
}
}
//================
Receiver:
// SimpleRx - the slave or the receiver
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
#define CE_PIN 9
#define CSN_PIN 10
const byte thisSlaveAddress[5] = {'R','x','A','A','A'};
RF24 radio(CE_PIN, CSN_PIN);
Servo myServo;
Servo myMotorThrust;
Servo myMotorLift;
int liftValue = 0;
int thrustValue = 0;
int angleValue = 0;
char dataReceived[10]; // this must match dataToSend in the TX
bool newData = false;
struct Received_data {
byte valX; // The Joystick position values
byte valY;
byte valSW;
byte valX2;
byte valY2;
byte valSW2;
};
Received_data received_data;
//===========
void setup() {
Serial.begin(9600);
myServo.attach(3);
myMotorThrust.attach(9);
myMotorLift.attach(5);
received_data.valX = 127;
received_data.valY = 127;
received_data.valSW = 0;
received_data.valX2 = 127;
received_data.valY2 = 127;
received_data.valSW2 = 0;
Serial.println("SimpleRx Starting");
radio.begin();
radio.setDataRate( RF24_250KBPS );
radio.openReadingPipe(1, thisSlaveAddress);
radio.startListening();
}
//=============
void loop() {
getData();
showData();
RunComponents();
}
//==============
void getData() {
if ( radio.available() ) {
radio.read( &received_data, sizeof(Received_data) );
newData = true;
}
}
void showData() {
if (newData == true) {
Serial.print("Data received ");
newData = false;
}
}
void RunComponents() {
thrustValue = map(received_data.valX2,0,255,1000,2000);
angleValue = map(received_data.valY,0,255,0,180);
liftValue = map(received_data.valX,0,255,1000,2000);
myServo.write(angleValue);
myMotorThrust.writeMicroseconds(thrustValue);
myMotorLift.writeMicroseconds(liftValue);
Serial.print("Angle: ");
Serial.print(angleValue);
Serial.print("\n");
Serial.print("Thrust: ");
Serial.print(thrustValue);
Serial.print("\n");
Serial.print("Lift: ");
Serial.print(liftValue);
}
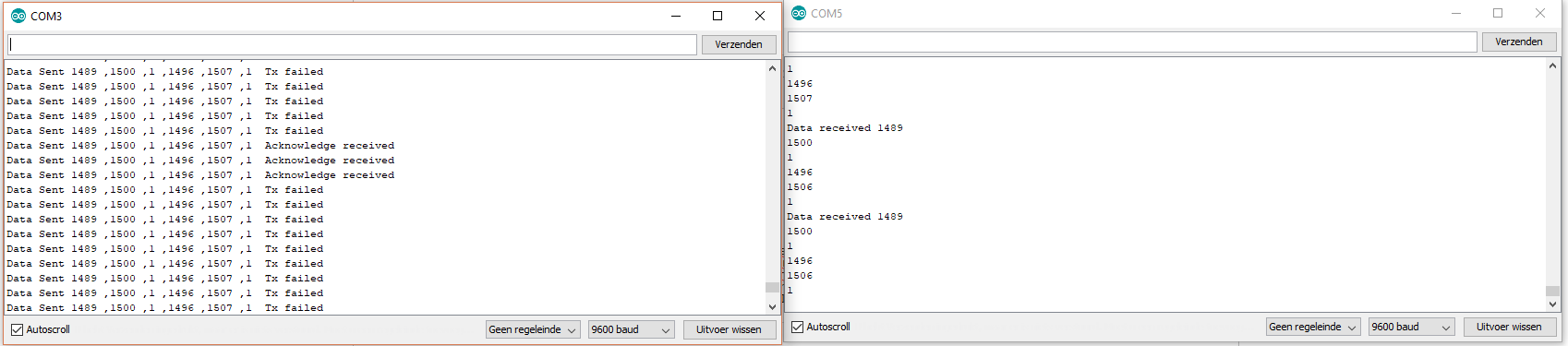
But it doesn't really work
Can you please help me make this work I can read code but writing my own is still hard.
Note that I deleted some of your code. Otherwise I could'nt compile the code (Did this when mixing up with the other code before hand it worked).
Thanks already