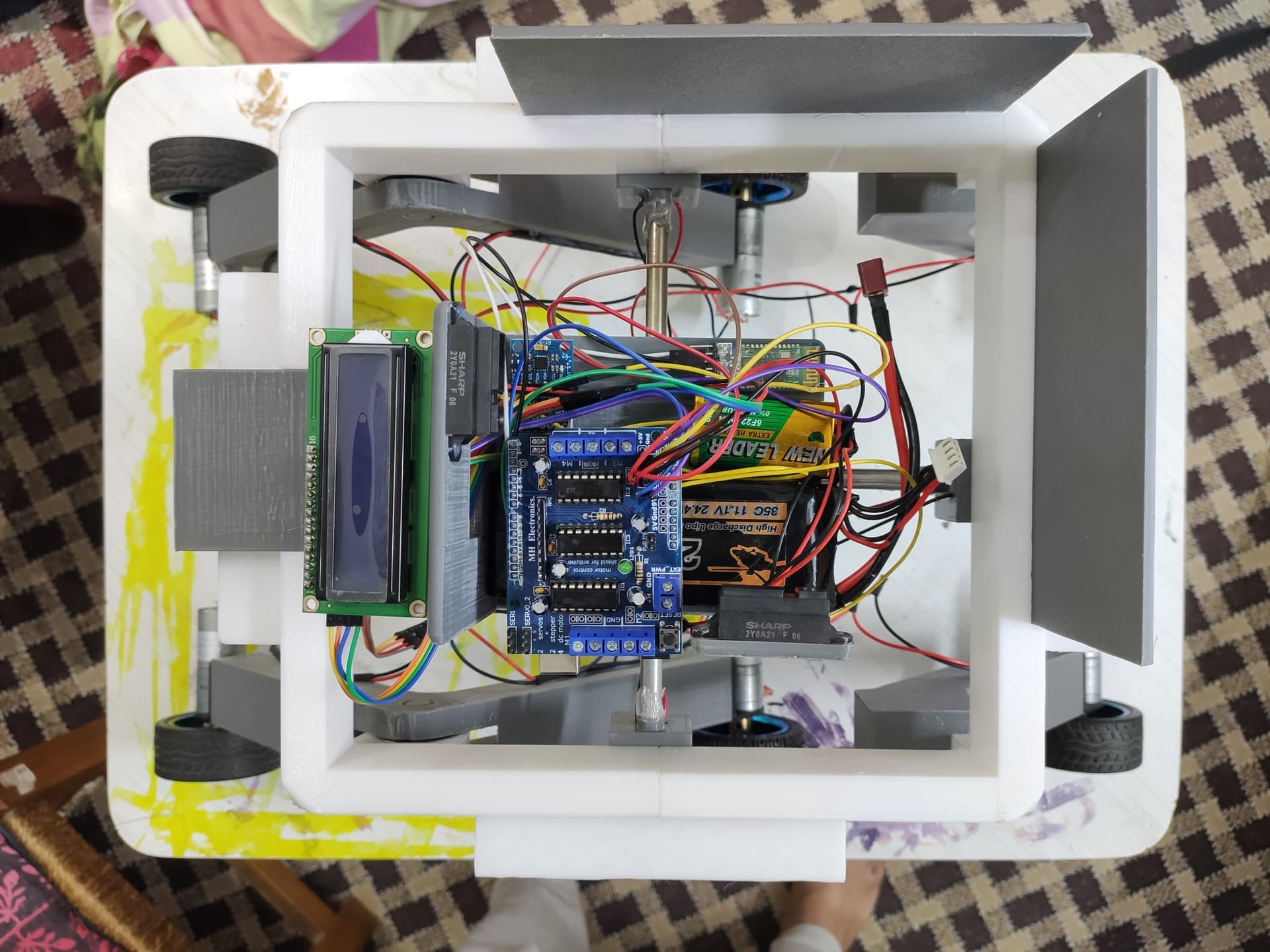
Hi, I'm new to arduino. I am making a custom Rover project for a University course. And my loop function in my code isn't looping. The LCD shows the data once and then goes blank. I even tried a serial.print() function in the loop function and everything appears only once.
Can anyone tell me what's wrong with my code?
~TIA
#include <AFMotor.h>
#include <SharpIR.h>
#include <MPU6050.h>
#include <Wire.h>
#include <Adafruit_I2CDevice.h>
#include <LiquidCrystal_I2C.h>
#define IR1 A0
#define IR2 A1
#define model 1080
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
SharpIR sensor1(IR1, model);
SharpIR sensor2(IR2, model);
int minx = 10; //minimum sensor1 distance
int maxx = 21; //maximum sensor1 distance
int miny = 12; //minimum sensor2 distance
int maxy = 20; //maximum sensor2 distance
int p = (minx + maxx) / 2;
int q = (miny + maxy) / 2;
char bt = 'S';
int trig = 2;
int echo = 9;
long timeInMicro;
long obs;
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
struct MyData
{
byte X;
byte Y;
byte Z;
};
MyData data;
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup()
{
//BAUD-RATE Setup
Serial.begin(9600);
//MOTOR-SPEED Setup
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
Stop();
//SONAR Setup
pinMode(2, OUTPUT);
pinMode(9, INPUT);
//GYRO Setup
Wire.begin();
mpu.initialize();
//DISPLAY Setup
lcd.init();
lcd.backlight();
}
void loop()
{
//MOVEMENT
bt = Serial.read(); //Bluetooth data
if (bt == 'F')
{
forward();
}
if (bt == 'B')
{
backward();
}
if (bt == 'L')
{
left();
}
if (bt == 'R')
{
right();
}
if (bt == 'S')
{
Stop();
}
//SONAR
digitalWrite(trig, LOW);
delayMicroseconds(2);
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
timeInMicro = pulseIn(echo, HIGH);
obs = ((timeInMicro / 29) / 2); //Sonar Reading in cm
/*
delay(500);
Serial.print("Obstruction = "); //For Serial Monitor Only
Serial.println(obs); //For Serial Monitor Only
*/
//INFRARED
unsigned long startTime = millis();
int d_x = sensor1.distance(); //IR1 Reading in cm
int d_y = sensor2.distance(); //IR2 Reading in cm
/*
delay(500);
Serial.print("Distance1: "); //For Serial Monitor Only
Serial.print(d_x); //For Serial Monitor Only
Serial.print("Distance2: "); //For Serial Monitor Only
Serial.println(d_y); //For Serial Monitor Only
*/
//GYRO
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
data.X = map(ax, -17000, 17000, 0, 255);
data.Y = map(ay, -17000, 17000, 0, 255);
data.Z = map(az, -17000, 17000, 0, 255);
int x = (data.X - 140) * (90 / 122.5); //Gyro X-axis angle reading
int y = (data.Y - 125) * (90 / 122.5); //Gyro Y-axix angle reading
/*
delay(500);
Serial.print("Axis X = "); //For Serial Monitor Only
Serial.print(data.X); //For Serial Monitor Only
Serial.print(" "); //For Serial Monitor Only
Serial.print("Axis Y = "); //For Serial Monitor Only
Serial.print(data.Y); //For Serial Monitor Only
Serial.print(" "); //For Serial Monitor Only
Serial.print("Axis Z = "); //For Serial Monitor Only
Serial.println(data.Z); //For Serial Monitor Only
*/
//DISPLAY
lcd.setCursor(0, 0);
lcd.print("Tilt = ");
lcd.print(x);
lcd.print("\337");
lcd.setCursor(0, 1);
lcd.print("Incline = ");
lcd.print(y);
lcd.print("\337");
delay(1000);
lcd.clear();
//Serial Monitor
delay(500);
Serial.print("Obstruction = ");
Serial.println(obs);
Serial.print("Distance1: ");
Serial.print(d_x);
Serial.print("Distance2: ");
Serial.println(d_y);
Serial.print("Axis X = ");
Serial.print(data.X);
Serial.print(" ");
Serial.print("Axis Y = ");
Serial.print(data.Y);
Serial.print(" ");
Serial.print("Axis Z = ");
Serial.println(data.Z);
//WEIGHT-SHIFT
if (obs <= 15)
{
while (d_y > miny)
{
motor2.run(BACKWARD);
}
}
else
{
if (x > 70)
{
while (d_x > minx)
{
motor1.run(FORWARD);
}
}
else if (x < -70)
{
while (d_x < maxx)
{
motor1.run(BACKWARD);
}
}
else
{
if (d_x > p)
{
while (d_x != p)
{
motor1.run(FORWARD);
}
}
else if (d_x < p)
{
while (d_x != p)
{
motor1.run(BACKWARD);
}
}
}
if (y > 50)
{
while (d_y < maxy)
{
motor2.run(FORWARD);
}
}
else if (y < -50)
{
while (d_y > miny)
{
motor2.run(BACKWARD);
}
}
else
{
if (d_y < q)
{
while (d_y != q)
{
motor2.run(FORWARD);
}
}
else if (d_y > q)
{
while (d_y != q)
{
motor2.run(BACKWARD);
}
}
}
}
}
void forward()
{
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void backward()
{
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void left()
{
motor3.run(BACKWARD);
motor4.run(FORWARD);
}
void right()
{
motor3.run(FORWARD);
motor4.run(BACKWARD);
}
void Stop()
{
motor3.run(RELEASE);
motor4.run(RELEASE);
}