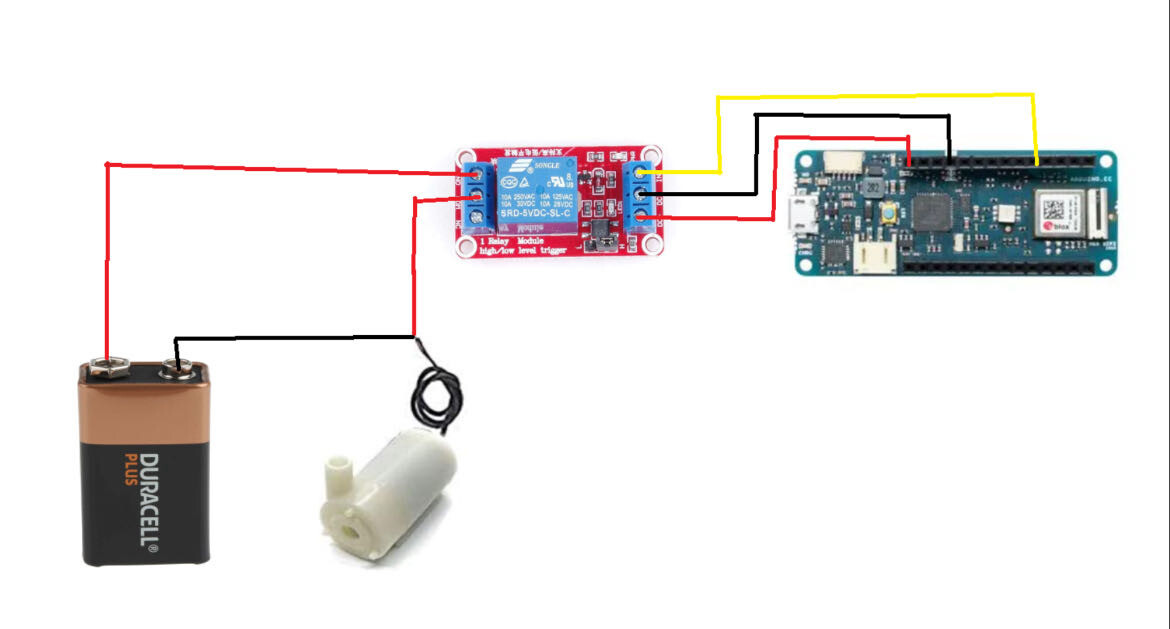
Hi, I am attempting to create a self watering plantpot which monitors soil moisture content, light and temperature, however when trying to add the waterpump to the rest of the circuit I am having issues as it will no longer run. With just the code below and without the relay and pump connected the circuit does the desired tasks. How do I add the waterpump and relay (which I can get to work on its own) to the rest of the circuitry, I have also used a secondary ps for the pump using 9v battery.
I think it may be a current issue as both circuits work when they are separate. Please see below code, and circuit schematic.

Here is the schematic for the relay and pump.
#define BLYNK_TEMPLATE_ID "TMPL5fmzE-Hpj"
#define BLYNK_TEMPLATE_NAME "Quickstart Template"
#define BLYNK_AUTH_TOKEN "xn54Yt1kZ8AX_7sozzQBeUZoEmolmOKR"
#define BLYNK_PRINT SerialUSB
#include <SPI.h>
#include <WiFiNINA.h>
#include <BlynkSimpleWiFiNINA.h>
#include <LiquidCrystal.h>
char ssid[] = "iPhone";
char pass[] = "password";
BlynkTimer timer;
BLYNK_WRITE(V0){
digitalWrite(7, param.asInt());
}
LiquidCrystal LCD(0,1,2,3,4,5);
#define analogPin A2
#define beta 3950
#define resistance 10
int lightRead = 0;
int lightLevel;
int button=6;
int moistureSensor;
int moisturePercentage;
#define moisture A4
//const int buttonPin = 6;// Pushbutton pin;
const int redPin = 8; // Red LED pin
const int greenPin = 10; // Green LED pin
const int bluePin = 9; // Blue LED pin
int motorState = LOW; // Motor state (OFF for default)
int lastButtonState = LOW; // Last state of the button
int currentButtonState; // Current state of the button
const int pump_pin = 11;
/*unsigned long startTimeMotor = 0;
const unsigned long MotorRunTime = 5000; // 5 seconds
unsigned long previousMillisMotor = 0;
*/
unsigned long startTimeMotor;
const unsigned long motorDuration = 5000;
//Arrays needed for trhe unhappy face on LCD screen
byte a[8] = {B00001,B00011,B00111,B01110,B11110,B11111,B11111,B11111};
byte b[8] = {B11111,B11111,B11111,B01110,B01110,B11111,B11111,B11111};
byte c[8] = {B10000,B11000,B11100,B01110,B01111,B11111,B11111,B11111};
byte d[8] = {B11011,B11000,B11100,B11110,B01111,B00111,B00011,B00001};
byte e[8] = {B11111,B00000,B00000,B00000,B00000,B11111,B11111,B11111};
byte f[8] = {B11011,B00011,B00111,B01111,B11110,B11100,B11000,B10000};
//Arrays needed for trhe happy face on LCD screen
byte g[8] = {B00001,B00011,B00111,B01110,B11100,B11111,B11111,B11111};
byte h[8] = {B11111,B11111,B11111,B01110,B00100,B11111,B11111,B11111};
byte i[8] = {B10000,B11000,B11100,B01110,B00111,B11111,B11111,B11111};
byte j[8] = {B11111,B11111,B11110,B11100,B01101,B00111,B00011,B00001};
byte k[8] = {B11111,B00000,B00000,B11111,B11111,B11111,B11111,B11111};
byte l[8] = {B11111,B11111,B01111,B00111,B10110,B11100,B11000,B10000};
//Array for small waterdrop
byte m[8] = {B00000,B00001,B00011,B00111,B01111,B11111,B11111,B01110};
void setup()
{
Serial.begin(9600);
LCD.begin(16,2);
SerialUSB.begin(115200);
Blynk.begin(BLYNK_AUTH_TOKEN, ssid, pass);
LCD.print(" Initializing ");
for(int b = 5; b <= 10; b++){
LCD.setCursor(b, 1);
LCD.print(".");
delay(500);
}
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
pinMode(pump_pin, OUTPUT); //Motor pinMode(1, INPUT); //on/off switch
pinMode(button, INPUT);
pinMode(A2, INPUT); //Temp
pinMode(A3, INPUT); //light
pinMode(A4, INPUT); //moisture
pinMode(7, OUTPUT);
//startTimeMotor = millis(); // Record the starting time
//code for lcd smileyface
LCD.createChar(0, a);
LCD.createChar(1, b);
LCD.createChar(2, c);
LCD.createChar(3, d);
LCD.createChar(4, e);
LCD.createChar(5, f);
//code for lcd unhappyface
LCD.createChar(6, g);
LCD.createChar(7, h);
LCD.createChar(8, i);
LCD.createChar(9, j);
LCD.createChar(10,k);
LCD.createChar(11,l);
//code for lcd raindrop
LCD.createChar(12, m);
}
void loop()
{
Blynk.run();
//tempDegrees = (((tempRead-20) * 0.488)-40);//calculates degrees
//tempDegrees = ((tempRead*5.0/1024.0)-0.5)*100.00;
//read thermistor value
long a = analogRead(analogPin);
float tempC = beta / (log((1025.0 * 10 / a - 10) / 10) + beta / 298.0) - 300; //conversion for degrees in celsius
Blynk.virtualWrite(V3, tempC);
//LCD.setCursor(0, 0); // set the cursor to column 0, line 0
// LCD.print("Temp: ");// Print a message of "Temp: "to the LCD.
// Print a centigrade temperature to the LCD.
//LCD.print(tempC);
// Print the unit of the centigrade temperature to the LCD.
//LCD.print(char(223));//print the unit" ℃ "
// LCD.print("C");
// (note: line 1 is the second row, since counting begins with 0):
//delay(200); //wait for 100 milliseconds
int moistureSensor = analogRead(moisture);
moisturePercentage = map(moistureSensor,0,1023,100,0);
Blynk.virtualWrite(V2, moisturePercentage);
int lightRead = analogRead(A3);
lightLevel = map(lightRead,1023,0,100,0);
// lightLevel = (lightLevel - 100) * -1;
Blynk.virtualWrite(V1, lightLevel);
Serial.println("M =");
Serial.println(moisturePercentage);
Serial.println("L =");
Serial.println(lightLevel);
Serial.println("T =");
Serial.println(tempC);
delay(500);
currentButtonState = digitalRead(button);
if (currentButtonState == HIGH && lastButtonState == LOW)
{
//runMotor();
Watering();
digitalWrite(redPin, LOW);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, HIGH);
//motorState = !motorState; // Toggle the motor state on button press
}
//controlMotor(); // Call the function to control the motor
lastButtonState = currentButtonState;
//=======This initial push button if statement^^^^ is breaking the millis and loop below!====
/*
if (digitalRead(button) == HIGH)
{
runMotor();
Watering();
digitalWrite(redPin, LOW);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, HIGH);
}
*/
unsigned long currentMillisLCD = millis();
//if both moisture and light are low (out of water)
if (moisturePercentage >=0 && lightLevel <=45){
lightandmoisturebad();
showvaluesbad();
//runMotor();
Watering();
digitalWrite(redPin, LOW);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, HIGH);
}
//if just light is low
else if(lightLevel <=45){
lightbad();
showvaluesbad();
}
//if just moisture is too high (in water)
else if(moisturePercentage <=80){
digitalWrite(pump_pin, LOW);
moisturebad();
showvaluesbad();
digitalWrite(redPin, HIGH);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, LOW);
delay(1000);
}
else if(moisturePercentage >=0){ //when moisture too low
showvaluesbad();
//runMotor();
Watering();
LCD.setCursor(0,0);
LCD.clear();
LCD.print("Warning,Moisture");
LCD.setCursor(0,1);
LCD.print("Level Too LOW");
digitalWrite(redPin, HIGH);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, LOW);
delay(1000);
}
else if(moisturePercentage >=0 && lightLevel >=45){
showvaluesgood();
lightandmoisturegood();
}
}
void lightandmoisturebad()
{
LCD.setCursor(0,0);
LCD.clear();
LCD.print("Warning, light &");
LCD.setCursor(0,1);
LCD.print("soil bad!");
delay(1000);
}
void lightandmoisturegood()
{
LCD.setCursor(0,0);
LCD.clear();
LCD.print("light &");
LCD.setCursor(0,1);
LCD.print("soil good!");
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);//Green RGB on
delay(1000);
LCD.clear();
}
void lightbad()
{
digitalWrite(pump_pin, LOW);
LCD.setCursor(0,0);
LCD.clear();
LCD.print("Warning, light");
LCD.setCursor(0,1);
LCD.print("level bad ");
digitalWrite(8, HIGH); //Red RGB on
digitalWrite(9, LOW);
digitalWrite(10, LOW);
delay(1000);
}
void moisturebad()
{
LCD.setCursor(0,0);
LCD.clear();
LCD.print("Warning, soil");
LCD.setCursor(0,1);
LCD.print("moisture bad ");
digitalWrite(8, HIGH); //Red RGB on
digitalWrite(9, LOW);
digitalWrite(10, LOW);
delay(1000);
}
void showvaluesgood()
{
int moistureSensor = analogRead(moisture);
moisturePercentage = map(moistureSensor,0,1023,100,0);
int lightRead = analogRead(A3);
lightLevel = map(lightRead,1023,0,100,0);
long a = analogRead(analogPin);
float tempC = beta / (log((1025.0 * 10 / a - 10) / 10) + beta / 298.0) - 300; //conversion for degrees in celsius
LCD.setCursor(0,0);
LCD.clear();
LCD.print("M=");
LCD.print(moisturePercentage);
LCD.setCursor(7,0);
LCD.print("L=");
LCD.print(lightLevel);
LCD.setCursor(0,1);
LCD.print("T=");
LCD.print(tempC);
LCD.print(char(223));
LCD.print("C");
//lcd smiley face for good values
LCD.setCursor(13, 0);
LCD.write(byte(0));
LCD.setCursor(14, 0);
LCD.write(byte(1));
LCD.setCursor(15, 0);
LCD.write(byte(2));
LCD.setCursor(13, 1);
LCD.write(byte(3));
LCD.setCursor(14, 1);
LCD.write(byte(4));
LCD.setCursor(15, 1);
LCD.write(byte(5));
delay(1000);
LCD.clear();
}
void showvaluesbad()
{
int moistureSensor = analogRead(moisture);
moisturePercentage = map(moistureSensor,0,1023,100,0);
int lightRead = analogRead(A3);
lightLevel = map(lightRead,1023,0,100,0);
long a = analogRead(analogPin);
float tempC = beta / (log((1025.0 * 10 / a - 10) / 10) + beta / 298.0) - 300; //conversion for degrees in celsius
LCD.setCursor(0,0);
LCD.clear();
LCD.print("M=");
LCD.print(moisturePercentage);
LCD.setCursor(7,0);
LCD.print("L=");
LCD.print(lightLevel);
LCD.setCursor(0,1);
LCD.print("T=");
LCD.print(tempC);
LCD.print(char(223));
LCD.print("C");
//lcd unhappy face for badvalue/s
LCD.setCursor(13, 0);
LCD.write(byte(6));
LCD.setCursor(14, 0);
LCD.write(byte(7));
LCD.setCursor(15, 0);
LCD.write(byte(8));
LCD.setCursor(13, 1);
LCD.write(byte(9));
LCD.setCursor(14, 1);
LCD.write(byte(10));
LCD.setCursor(15, 1);
LCD.write(byte(11));
delay(1500);
//LCD.clear();
}
void Watering()
{
LCD.setCursor(0,0);
LCD.clear();
LCD.print("Watering: ");
digitalWrite(pump_pin, HIGH);
LCD.setCursor(11, 0);
LCD.write(byte(12));
LCD.setCursor(10, 1);
LCD.write(byte(12));
LCD.setCursor(13, 0);
LCD.write(byte(12));
LCD.setCursor(12, 1);
LCD.write(byte(12));
LCD.setCursor(15, 0);
LCD.write(byte(12));
LCD.setCursor(14, 1);
LCD.write(byte(12));
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
delay(5000);
digitalWrite(pump_pin, LOW);
}
/*
void runMotor() {
unsigned long currentTimeMotor = millis();
unsigned long elapsedTimeMotor = currentTimeMotor - startTimeMotor;
// Check if 5 seconds have passed
if (elapsedTimeMotor < motorDuration) {
// Turn the motor on
digitalWrite(pump_pin, HIGH);
digitalWrite(redPin, LOW);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, HIGH);
} else {
// Turn the motor off after 5 seconds
digitalWrite(pump_pin, LOW);
digitalWrite(redPin, LOW);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, LOW);
// Reset the start time for the next cycle
startTimeMotor = millis();
}
}
void controlMotor(){
if (motorState == HIGH) {
// Motor control code for when the button is pressed (Start)
digitalWrite(pump_pin, HIGH);
LCD.setCursor(0,0);
LCD.print("Watering");
for (int a = 8; a <= 12; a++) //LCD Cursor 8-12
{
LCD.setCursor(0,0);
LCD.print("Watering");
LCD.setCursor(a, 0);
LCD.print(".");
delay(1000);
}
LCD.clear();
} else {
// Motor control code for when the button is not pressed (stop)
digitalWrite(pump_pin, LOW);
}
}
*/