Hardware:
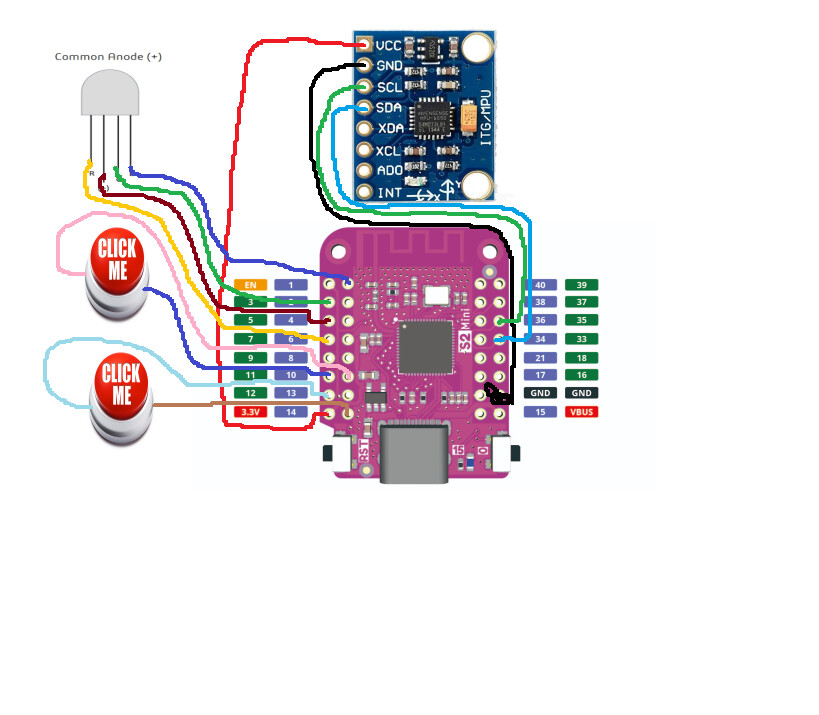
Esp32 s2 mini (wemos clone board)
GY-521 gyro
2x buttons
1 rgb led
thats it
I know this code is unoptimized cause i wrote it (mostly copy and paste anyway). I was wondering how i could optimize it, basically all this does is read a mpu6050 and send the data through udp to a udp server i have running on my pc. It works execpt it overheats pretty fast, its not efficent and I'd like to fix that. Please help ![]()
#include <Wire.h>
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include <WiFi.h>
#include <WiFiUdp.h>
MPU6050 mpu;
#define LED_PIN 15
#define BUTTON1 14
#define BUTTON2 10
// Wifi
int status = WL_IDLE_STATUS;
char ssid[] = "myWifiSsd";
char pass[] = "superSecretPassword";
int port = 5468;
IPAddress ip(im,not,getting,doxxed);
WiFiUDP Udp;
// Gyro stuff
float RateRoll, RatePitch, RateYaw;
float AccX, AccY, AccZ;
float AngleRoll, AnglePitch;
float LoopTimer;
uint8_t devStatus;
uint16_t packetSize;
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64];
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity;
float ypr[3];
float axZero = 0;
float ayZero = 0;
float azZero = 0;
// Offset stuff
int16_t ax, ay, az, gx, gy, gz;
int buffersize=1000;
int acel_deadzone=8;
int giro_deadzone=1;
int mean_ax,mean_ay,mean_az,mean_gx,mean_gy,mean_gz,state=0;
int ax_offset,ay_offset,az_offset,gx_offset,gy_offset,gz_offset;
void setup() {
Serial.begin(57600);
status = WiFi.begin(ssid, pass);
delay(10000);
Udp.begin(port);
//Buttons
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
pinMode(15, OUTPUT);
pinMode(14, INPUT_PULLUP);
pinMode(10, INPUT_PULLUP);
// LED
pinMode(1, OUTPUT);
pinMode(3, OUTPUT);
pinMode(5, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(5,HIGH);
digitalWrite(1,HIGH);
digitalWrite(5,HIGH);
digitalWrite(7,HIGH);
digitalWrite(11,LOW);
digitalWrite(15, HIGH);
digitalWrite(15, LOW);
Wire.begin(33,35);
Wire.setClock(400000);
mpu.initialize();
Serial.println(F("Testing device connections..."));
devStatus = mpu.dmpInitialize();
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
while(digitalRead(14)!=LOW){
digitalWrite(3,LOW);
digitalWrite(7,LOW);
delay(1000);
digitalWrite(3,HIGH);
digitalWrite(7,HIGH);
delay(1000);
}
digitalWrite(3,HIGH);
digitalWrite(7,HIGH);
delay(200);
digitalWrite(3,LOW);
Serial.println("\nStarting offset calibration...\n");
// Reset offsets
mpu.setXAccelOffset(0);
mpu.setYAccelOffset(0);
mpu.setZAccelOffset(0);
mpu.setXGyroOffset(0);
mpu.setYGyroOffset(0);
mpu.setZGyroOffset(0);
Serial.println("Reading sensors for first time...");
meansensors();
delay(200);
Serial.println("\nCalculating offsets...");
calibration();
delay(200);
meansensors();
Serial.println("\nFinished calibration!\n");
Serial.print("\nOffsets:\t");
Serial.print(ax_offset);
Serial.print("\t");
Serial.print(ay_offset);
Serial.print("\t");
Serial.print(az_offset);
Serial.print("\t");
Serial.print(gx_offset);
Serial.print("\t");
Serial.print(gy_offset);
Serial.print("\t");
Serial.println(gz_offset);
mpu.setXAccelOffset(ax_offset);
mpu.setYAccelOffset(ay_offset);
mpu.setZAccelOffset(az_offset);
mpu.setXGyroOffset(gx_offset);
mpu.setYGyroOffset(gy_offset);
mpu.setZGyroOffset(gz_offset);
digitalWrite(3,HIGH);
while(!digitalRead(10)==LOW){
digitalWrite(1,LOW);
delay(1000);
digitalWrite(1,HIGH);
delay(1000);
}
if (devStatus == 0) {
// Calibration Time: generate offsets and calibrate our MPU6050
mpu.CalibrateAccel(6);
mpu.CalibrateGyro(6);
mpu.PrintActiveOffsets();
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
Serial.println(F("DMP Enabled"));
delay(100);
digitalWrite(1,LOW);
digitalWrite(3,LOW);
digitalWrite(7,LOW);
}
void loop() {
if (mpu.dmpGetCurrentFIFOPacket(fifoBuffer)) {
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr\t");
Serial.print((ypr[0] * 180/M_PI)-axZero);
Serial.print("\t");
Serial.print(((ypr[1] * 180/M_PI)-7)-ayZero);
Serial.print("\t");
Serial.println((ypr[2] * 180/M_PI)-azZero);
// Wifi data transmit (UDP)
String message = "1," + String((ypr[0] * 180 / M_PI) - axZero) + "," + String(((ypr[1] * 180 / M_PI) - 7) - ayZero) + "," + String((ypr[2] * 180 / M_PI) - azZero);
// Convert the String to a char array
char charBuf[message.length() + 1]; // +1 for the null terminator
message.toCharArray(charBuf, message.length() + 1);
Udp.beginPacket(ip, port);
int i = 0;
while (message[i] != 0)
Udp.write((uint8_t)charBuf[i++]);
Udp.endPacket();
delay(15);
}
if(digitalRead(14)==LOW){
digitalWrite(3,LOW);
mpu.setXAccelOffset(0);
mpu.setYAccelOffset(0);
mpu.setZAccelOffset(0);
mpu.setXGyroOffset(0);
mpu.setYGyroOffset(0);
mpu.setZGyroOffset(0);
Serial.println("Recalibrating");
meansensors();
delay(200);
Serial.println("\nCalculating offsets...");
calibration();
delay(200);
meansensors();
Serial.println("\nFinished calibration!\n");
Serial.print("\nOffsets:\t");
Serial.print(ax_offset);
Serial.print("\t");
Serial.print(ay_offset);
Serial.print("\t");
Serial.print(az_offset);
Serial.print("\t");
Serial.print(gx_offset);
Serial.print("\t");
Serial.print(gy_offset);
Serial.print("\t");
Serial.println(gz_offset);
mpu.setXAccelOffset(ax_offset);
mpu.setYAccelOffset(ay_offset);
mpu.setZAccelOffset(az_offset);
mpu.setXGyroOffset(gx_offset);
mpu.setYGyroOffset(gy_offset);
mpu.setZGyroOffset(gz_offset);
digitalWrite(3,HIGH);
}
if (digitalRead(10)==LOW) {
digitalWrite(1,LOW);
axZero -= 0-((ypr[0] * 180/M_PI)-axZero);
ayZero -= 0-(((ypr[1] * 180/M_PI)-7)-ayZero);
azZero -= 0-((ypr[2] * 180/M_PI)-azZero);
delay(200);
digitalWrite(1,HIGH);
}
delay(10);
}
void meansensors(){
long i=0,buff_ax=0,buff_ay=0,buff_az=0,buff_gx=0,buff_gy=0,buff_gz=0;
while (i<(buffersize+101)){
// read raw accel/gyro measurements from device
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
if (i>100 && i<=(buffersize+100)){ //First 100 measures are discarded
buff_ax=buff_ax+ax;
buff_ay=buff_ay+ay;
buff_az=buff_az+az;
buff_gx=buff_gx+gx;
buff_gy=buff_gy+gy;
buff_gz=buff_gz+gz;
}
if (i==(buffersize+100)){
mean_ax=buff_ax/buffersize;
mean_ay=buff_ay/buffersize;
mean_az=buff_az/buffersize;
mean_gx=buff_gx/buffersize;
mean_gy=buff_gy/buffersize;
mean_gz=buff_gz/buffersize;
}
i++;
delay(2); //Needed so we don't get repeated measures
}
}
void calibration(){
ax_offset=-mean_ax/8;
ay_offset=-mean_ay/8;
az_offset=(16384-mean_az)/8;
gx_offset=-mean_gx/4;
gy_offset=-mean_gy/4;
gz_offset=-mean_gz/4;
while (1){
int ready=0;
mpu.setXAccelOffset(ax_offset);
mpu.setYAccelOffset(ay_offset);
mpu.setZAccelOffset(az_offset);
mpu.setXGyroOffset(gx_offset);
mpu.setYGyroOffset(gy_offset);
mpu.setZGyroOffset(gz_offset);
meansensors();
if (abs(mean_ax)<=acel_deadzone) ready++;
else ax_offset=ax_offset-mean_ax/acel_deadzone;
if (abs(mean_ay)<=acel_deadzone) ready++;
else ay_offset=ay_offset-mean_ay/acel_deadzone;
if (abs(16384-mean_az)<=acel_deadzone) ready++;
else az_offset=az_offset+(16384-mean_az)/acel_deadzone;
if (abs(mean_gx)<=giro_deadzone) ready++;
else gx_offset=gx_offset-mean_gx/(giro_deadzone+1);
if (abs(mean_gy)<=giro_deadzone) ready++;
else gy_offset=gy_offset-mean_gy/(giro_deadzone+1);
if (abs(mean_gz)<=giro_deadzone) ready++;
else gz_offset=gz_offset-mean_gz/(giro_deadzone+1);
if (ready==6) break;
}
}
also how do i measure the mah it is consuming so i can order the right battery?