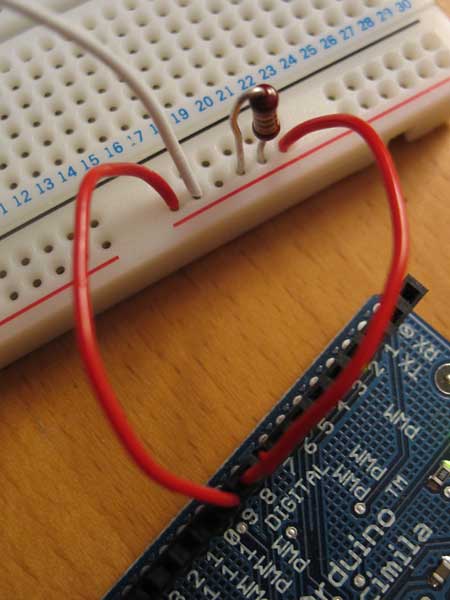
Some experiments with the Arduino as a capacitive sensor. All it requires is a 10 M resistor and a piece of wire. I was able to sense a hand about four inches from my 1.5" sq aluminum foil sensor.
Included are some machine code and port manipulation and an easy smoothing filter.
// CapSense.pde
// Paul Badger 2007
// Fun with capacitive sensing and some machine code - for the Arduino (or Wiring Boards).
// Note that the machine code is based on Arduino Board and will probably require some changes for Wiring Board
// This works with a high value (1-10M) resistor between an output pin and an input pin.
// When the output pin changes it changes the state of the input pin in a time constant determined by R * C
// where R is the resistor and C is the capacitance of the pin plus any capacitance present at the sensor.
// It is possible when using this setup to see some variation in capacitance when one's hand is 3 to 4 inches from the sensors
// Try experimenting with larger sensors. Lower values of R will probably yield higher reliability.
// Use 1 M resistor (or less maybe) for absolute touch to activate.
// With a 10 M resistor the sensor will start to respond 1-2 inches away
// Setup
// Connect a 10M resistor between pins 8 and 9 on the Arduino Board
// Connect a small piece of alluminum or copper foil to a short wire and also connect it to pin 9
// When using this in an installation or device it's going to be important to use shielded cable if the wire between the sensor is
// more than a few inches long, or it runs by anything that is not supposed to be sensed.
// Calibration is also probably going to be an issue.
// Instead of "hard wiring" threshold values - store the "non touched" values in a variable on startup - and then compare.
// If your sensed object is many feet from the Arduino Board you're probably going to be better off using the Quantum cap sensors.
// Machine code and Port stuff from a forum post by ARP http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1169088394/0#0
int i;
unsigned int x, y;
float accum, fout, fval = .07; // these are variables for a simple low-pass (smoothing) filter - fval of 1 = no filter - .001 = max filter
void setup() {
Serial.begin(9600);
DDRB=B101; // DDR is the pin direction register - governs inputs and outputs- 1's are outputs
// Arduino pin 8 output, pin 9 input, pin 10 output for "guard pin"
// preceding line is equivalent to three lines below
// pinMode(8, OUTPUT); // output pin
// pinMode(9, INPUT); // input pin
// pinMode(10, OUTPUT); // guard pin
digitalWrite(10, LOW); //could also be HIGH - don't use this pin for changing output though
}
void loop() {
y = 0; // clear out variables
x = 0;
for (i=0; i < 4 ; i++ ){ // do it four times to build up an average - not really neccessary but takes out some jitter
// LOW-to-HIGH transition
PORTB = PORTB | 1; // Same as line below - shows programmer chops but doesn't really buy any more speed
// digitalWrite(8, HIGH);
// output pin is PortB0 (Arduino 8), sensor pin is PortB1 (Arduinio 9)
while ((PINB & B10) != B10 ) { // while the sense pin is not high
// while (digitalRead(9) != 1) // same as above port manipulation above - only 20 times slower!
x++;
}
delay(1);
// HIGH-to-LOW transition
PORTB = PORTB & 0xFE; // Same as line below - these shows programmer chops but doesn't really buy any more speed
//digitalWrite(8, LOW);
while((PINB & B10) != 0 ){ // while pin is not low -- same as below only 20 times faster
// while(digitalRead(9) != 0 ) // same as above port manipulation - only 20 times slower!
y++;
}
delay(1);
}
fout = (fval * (float)x) + ((1-fval) * accum); // Easy smoothing filter "fval" determines amount of new data in fout
accum = fout;
Serial.print((long)x, DEC); // raw data - Low to High
Serial.print( " ");
Serial.print((long)y, DEC); // raw data - High to Low
Serial.print( " ");
Serial.println( (long)fout, DEC); // Smoothed Low to High
}