Hi, ich lese seit einer Weile still mit.
Seit einer Weile bastle ich schon mit dem Arduino.
Das aktuelle Projekt ist das Messen von Motoröldruck und -temperatur in meinem BMW E39.
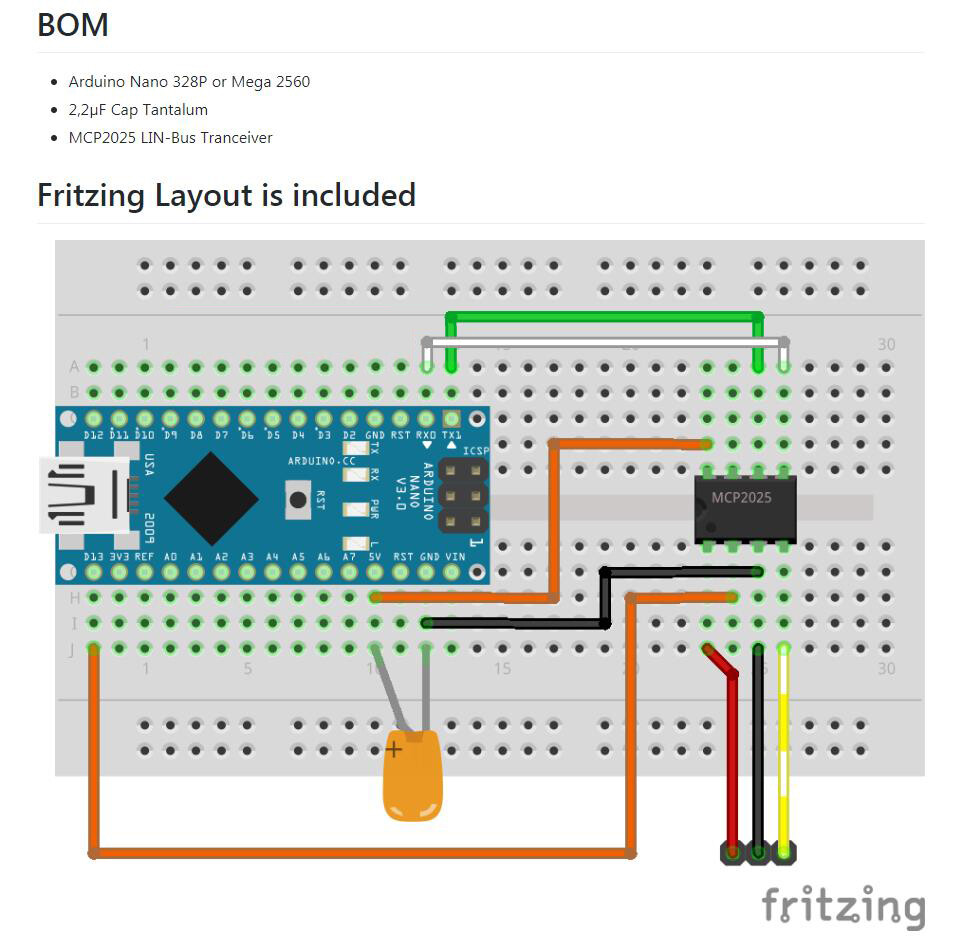
Hierfür habe ich einen Widerstandstemperatursensor und einen Drucksensor. Dazu ein i2C Display und nicht zuletzt einen MCP2025 um die Daten auf den I-BUS vom Wagen einzuspeisen (und da wieder auszulesen und in der "I-BUS App" anzuzeigen). Angeschlossen an einem Arduino Nano (Nachbau von AZ Delivery).
Von Anfang an habe ich sporadisch das Problem, dass das Display einfriert oder gar kryptische Zeichen bringt. Nur ein Reset/Neustart erweckt das das "System" wieder zum Leben. Mal nur einen Augenblick, mal läuft es über Stunden.
Spannung bekommt der Nano vom MCP2025 und der wiederum via 12V vom Wagen. Seit geraumer Zeit funktioniert das parallel nicht mehr - ich speise nun zusätzlich via USB Spannung ein. Nur wenn beides dran ist lebt das Ganze. Sicher muss ich auch hier auf Spuren suche gehen.
Das Nano habe ich bereits mehrfach gegen andere getauscht - das Problem bleibt.
Für mich ist nun die Frage, ob ich mir Störungen über die Leitungen oder das I2C einfange - dazu las ich erst heute morgen, dass man die beiden Signal-Leitungen SDA / SCL mit je 4,7kOhm gegen 5V up-pullen soll? Kann es das schon sein? Ich meine mich zu erinnern, dass das System auch mit abgestecktem Display einfriert. (Is länger her aber schnell zu testen).
Dazu kam der Hinweis, dass man auch am Analog-Eingang einen Pull-Up setzen soll? Macht das Sinn.
Letztlich die Frage, ob man "Fehler" am Analog-Eingang nicht im Code abfangen kann. Wobei ich aktuell keine Idee für einen Fehler, außer einem Kurzschluss vorstellen kann.
Auch hatte ich die BUS Übertragung mal als Fehler auf dem Schirm. Aber auch dessen Auskommentierung brachte keinen Effekt.
Einen Schaltplan/Fritzing muss ich euch noch schuldig bleiben. Aber den Code hänge ich mal an.
PS: Aktuell plane ich die beiden Sensoren gegen den BOSCH PST-F1 zu tauschen, der bereits bereits liegt. Dafür möchte ich aber, dass das System stabil läuft.
int analogPin6 = A6; // Analog-Input Pin6 => Öldruck als 5V-Signal
int analogPin7 = A7; // Analog-Input Pin7 => Öltemperatur als Widerstand
float R1 = 5.14; //Wert des bekannten Widerstands, ehemals 107000 Ohm => R "/1000" nun entfallen da nun in kOhm
float R; //Widerstand des Temperaturfühlers
float SpannungR2; //Spannung über dem zu messenden Widerstand
float oiltemp; // Öltemperatur
float oilpressure; // Öldruck
float Tmittel=0; // gemittelte Öltemperatur
float pmittel=0; //gemittelter Öldruck
unsigned long last_oil_send = 0;
unsigned long last_oled_send = 0;
int sendTime = 2000;
#include <U8g2lib.h>
U8G2_SSD1306_128X32_UNIVISION_F_HW_I2C u8g2(U8G2_R0, /* reset=*/ U8X8_PIN_NONE); // Adafruit ESP8266/32u4/ARM Boards + FeatherWing OLED
#include <IbusTrx.h> // include the IbusTrx library
IbusTrx ibusTrx; // create a new IbusTrx instance
#define WAKE_PIN 13
#define wake_set(...) digitalWrite(WAKE_PIN, __VA_ARGS__)
void setup(void) {
u8g2.begin();
ibusTrx.begin(Serial); // begin listening for messages
pinMode(WAKE_PIN, OUTPUT);
wake_set(HIGH);
}
void loop()
{
//Berechung Widerstand Temperaturfühler
SpannungR2 = 5 / 1023.0 * analogRead(analogPin7);
R = R1 * (SpannungR2 / (5 - SpannungR2));
//Umrechnung Widerstand in Temperatur
if (R > 45) {
oiltemp = 0.00479709*pow(R, 2) - 1.00497778*R + 61.07424494;
}
else {
oiltemp = 0.0000001326*pow(R, 6) - 0.0000236053*pow(R, 5) + 0.0016840356*pow(R, 4) - 0.0620097366*pow(R, 3) + 1.2759648324*pow(R, 2) - 15.504389816*R + 138.9049501569;
}
//Berechnung Öldruck
if ((analogRead(analogPin6) / 1023.00 * 5) * 1.379 - 0.69 <= 0.05) {
oilpressure = 0;
}
else {
oilpressure = (analogRead(analogPin6) / 1023.00 * 5) * 1.379 - 0.69;
}
//gleitenden Mittelwert bilden
Tmittel = 0.95*Tmittel + 0.05*oiltemp;
pmittel = 0.95*pmittel + 0.05*oilpressure;
//Temp auf 0,5er Schritte runden
Tmittel = trunc(Tmittel * 2 + 0.5) / 2;
// an I2C-Display senden alle 200 ms
int sendTimeOLED = 200;
if (millis() - last_oled_send > sendTimeOLED) {
last_oled_send = millis();
u8g2.clearBuffer();
//u8g2.setFont(u8g2_font_8x13B_tf);
//u8g2.setFont(u8g2_font_10x20_tf); //16px hoch
u8g2.setFont(u8g2_font_fur20_tf); //20px hoch
u8g2.setFontRefHeightExtendedText();
u8g2.setDrawColor(1);
u8g2.setFontPosTop();
u8g2.setFontDirection(0);
u8g2.setCursor(0, 1);
u8g2.print(pmittel, 2);
u8g2.setCursor(72, 1);
if (Tmittel<100) {u8g2.print(Tmittel, 1);
}
else
{u8g2.print(Tmittel, 0);
}
u8g2.setFont(u8g2_font_5x7_tf);
u8g2.drawUTF8(0, 25, "Öldruck bar");
u8g2.drawUTF8(72, 25, "Öltemp. C");
u8g2.sendBuffer();
}
// auf I-BUS senden alle 2000 ms
if (ibusTrx.available()) { // receive and write to I-BUS
IbusMessage m = ibusTrx.readMessage(); // grab incoming messages and clear read buffer
if (millis() - last_oil_send > sendTime) {
last_oil_send = millis();
uint8_t oil[6] = {
0xAA, // sender ID (diagnostic interface)
0x05, // length of the message payload (including destination ID and checksum)
0xAB, // destination ID (body control module)
0xBB, // the type of message (IO manipulation)
byte(pmittel * 10), // "oilpressure"
byte(Tmittel) // "oiltemp"
};
ibusTrx.write(oil); // write message in tx buffer
}
}
}