Bonjour à tous!
Je me présente, Fabien, j'ai découvert l'arduino ($) enthousiaste) il y à quelques semaines suite à une idée de projet pour contrôler un rail motorisé.
Comment peut ton brancher un moteur de 2.8 ampères/3volts sur un arduino?
J'ai suivi quelques pistes concernant des "shield" (contrôleurs de moteurs?) ou composant L298, mais je vous avoue que je ne sais plus ou donner de la tête.
Quel est le moyen le plus simple de brancher mon Phidget 3310 au Arduino?
Il faut manifestement prendre des précautions. Sur le site de Phidgets Inc ils disent de piloter le moteur à courant constant. Je ne suis pas certain qu'il y ait des shields qui le fassent.
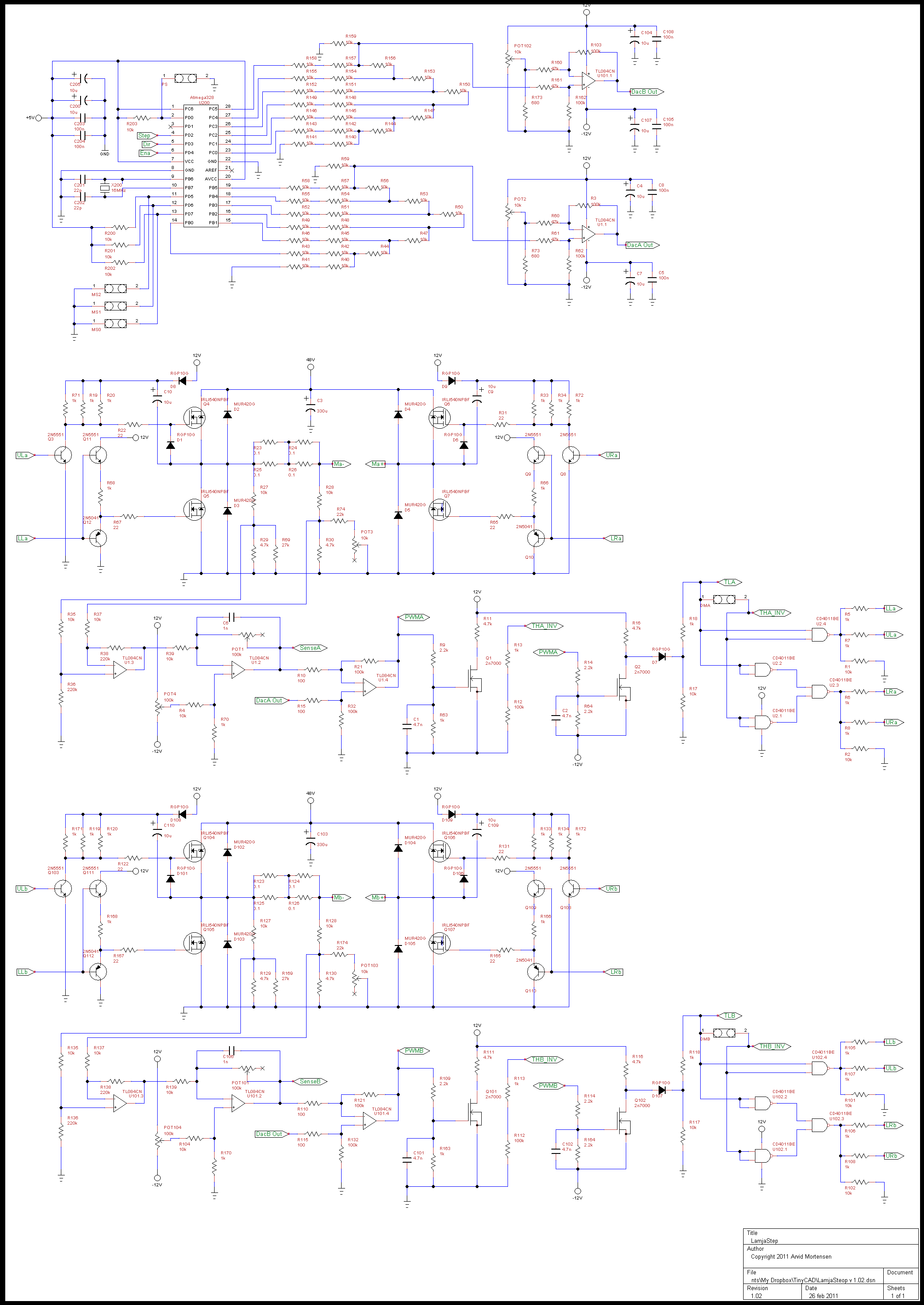
skywodd:
(...)
Mais tout n'est pas perdu c'est un atmega328 sur le schéma, donc avec une carte arduino ça doit être faisable ^^
De plus il semblerait bien que sur la vidéo l'on voit l'IDE Arduino tourner sur l'ordi' qui est à gauche du plan de travail (?), dans les premières secondes de la vidéo.
Aussi, que le moteur est piloté en 12V (on le voit aussi en 24V il me semble dans une autre vidéo). Je me posais la question "pourquoi vouloir le piloter en 3V ?"..
S'il n'y a pas de contrainte particulière dans le cahier de charges (3V ???, accélération, vitesse, micro-pas...) et si la charge permet de rester en dessous de 2A je pense qu'un pilotage simple de ce moteur par Arduino à travers la paire de composants L297 + L298 est envisageable. (15€ les deux puces) (la gestion du courant est prise en compte par cet ensemble de composants grace aux liaisons 'Sense')
Autre schéma
C'est équivalent (en 2 circuits intégrés) au schéma à composants discrets indiqué par skywodd
Pour mon moteur je ne cherche pas la vitesse mais la puissance.
Est ce que je peut tester mon moteur directement avec le arduino (sans shield) ?
J'ai était demander sur un site de robotique voici leur réponse :
a) le shield à base de L298 n'est pas adapté pour les moteurs pas-à-pas, et surtout pas pour une tension de 3,2V.
b) pour ce genre de moteur il faut un contrôleur pas-à-pas à base d'Allegro ou de toshiba.
Je vais bientôt proposer un contrôleur à base d'Allegro l'EasyStep4, mais son courant est limité à 750mA par phase.
Pour votre utilisation il faut mieux rechercher un contrôleur de cnc (fraiseuse numérique), vous aurez l"alimentation (pas facile à trouver 3,2V/3A) et le contrôleur de stepper.
Je pense qu'il ne faut pas trop focaliser sur les 3V qui ne sont que la traduction de la loi d'ohm aux bornes d'un enroulement du moteur avec 2,8A maxi dans 1,1 Ohm.
Ce qui est par contre essentiel c'est de gérer et maitriser le courant dans les enroulements, la tension suivra. La paire L297 L298 sait bien faire ça et on obtient un courant triangulaire bien maîtrisé (voir "load current" , figure 18 du pdf joint).
Il ne faut pas alimenter le pont (L298) en 3V, il faut limiter le courant à 2,8A ce qui aura pour conséquence de limiter la tension aux bornes d'un enroulement à 3V. ...les enroulements sont alimentés par le "PWM "interne au L297.
Il faut comme le signalait fdufnews gérer ce moteur "en courant" et non "en tension".
Si on donne au L297 (par sa broche Vref) la consigne 'courant=1,5 A" il gèrera le hacheur en conséquence et la tension moyenne sera d'environ 1,6 V, même avec un VDD de 12V
L'inductance des enroulements (5 mH) joue içi un rôle important dans le "hacheur" qui se superpose au séquencement des phases du moteur.
Mes références sont plutôt anciennes.... il ya sans doute mieux aujourd'hui que L297+L298 !!!
NB : On trouve souvent le L298 utilisé seul , sans son L297, pour des moteurs à courant continu, (ça semble etre le cas des shields à L298). ça ne convient pas . içi il faut quelque chose de plus : un pont en H, un séquencement et une gestion du courant.
Ce n'est pas bon marche mais cela va marcher a tous les coups et c'est indestructible. Tu connectes les fils du moteur, l'alimentation (qui peut aller jusque 80V oui oui meme avec ton moteur 3V2) et 2 fils vers Arduino. Les masses ensemble et tu oublies le materiel pour te consacrer au soft.
J'utilise ce materiel a mon entiere satisfaction (et je n'ai aucun lien avec le constructeur ).
J'aurai du être plus explicite : Les ponts en H du A3982 sont formés de transistors MOS et non de transistors bipolaires NPN comme dans le L298.
les schémas de base sont à part cela identiques :
-choix du sens de rotation par DIR ou CW/CCW
-régulation du courant à la valeur de consigne choisie
Je plussoie pour les drivers Allegro, qui sont excellent. J'en utilise très souvent pour des applications demandant une précision notable.
Par contre leur mise en oeuvre n'est pas forcément ce qu'il y a de plus simple; si le but est de ne pas se prendre trop la tête et qu'il y a une possibilité de mettre un petit billet, il vaut mieux s'orienter vers une solution "toute faite".
C'est un choix à faire, en fonction des moyens (techniques et financiers).
Sinon, en utilisant un driver Allegro il serait peut-être bon de lui ajouter un étage de puissance en sortie (MOSFET externes couplés aux DMOS) car même la version qui plafonne à 2.5A va être limite, AMHA...