Hi, first time poster. I've been working on this for three weeks to no avail. ![]() Trying to get the RX8 instrument cluster to communicate. Once that is done, I plan on using it for sim racing. Anyhow, here is where I'm stuck. If I haven't provided enough info, please let me know and I will get it. Thanks
Trying to get the RX8 instrument cluster to communicate. Once that is done, I plan on using it for sim racing. Anyhow, here is where I'm stuck. If I haven't provided enough info, please let me know and I will get it. Thanks
-
As mentioned above, using Arduino Uno R3 with ROBOTDYN CanBus Shield
Here is the link to ROBOTDYN Shield Schematic https://robotdyn.com/pub/media/0G-00004323==CANBUS-Shiled/DOCS/Schematic==0G-00004323==CANBUS-Shiled.pdf -
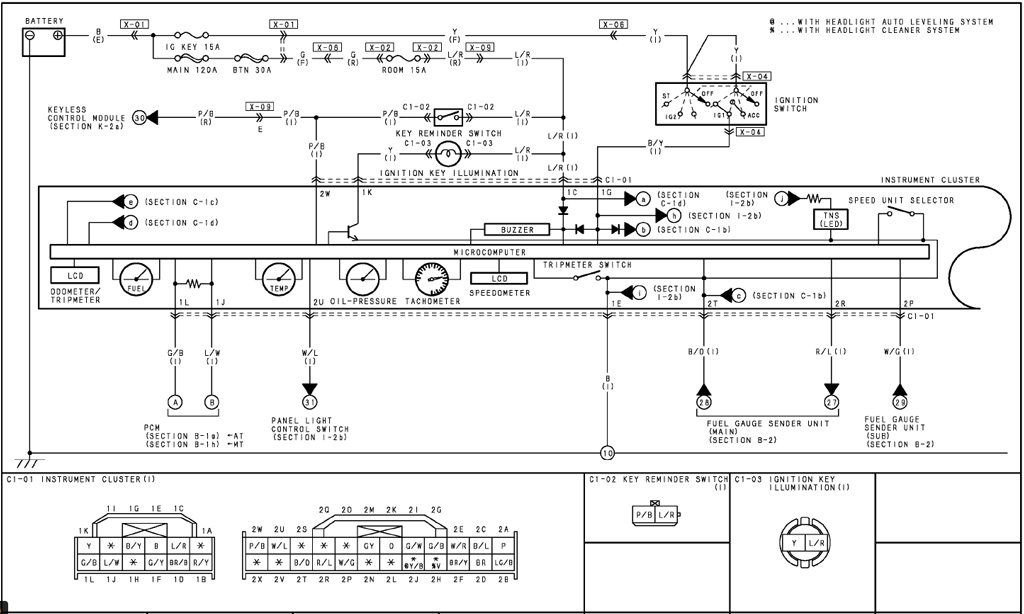
Using instrument cluster out of RX8. Cluster powered by separate 12v 750ma plugin. Arduino/shield powered by pc. Both Arduino and cluster share common ground. The ohm resistance reading across CanL and CanH is 252R. I have reduced that to 120R. I am certain it only needs 120R at the arduino end as the cluster has 120R in it. I have checked my wiring and connections over and over to be sure they are connected correctly. The cluster is good and goes through its normal check when powered up. Here are links for the cluster schematic and pinout.
https://www.sim-pc.de/wp-content/uploads/2017/02/rx8-pins.jpg
https://www.xsimulator.net/community/proxy.php?image=http%3A%2F%2Fi864.photobucket.com%2Falbums%2Fab206%2FTansooleng%2Finstrument-cluster-1_zps4eac18b1.jpg&hash=90fb227f0ce91b689eab0d4c1a7f75a0 -
I am getting a solid RX light with everything hooked up using this code. I am in no way a coding guru, but after weeks of reading, searching, etc. This looked like the best place to start.
{kind=link}
{kind=link}
#include <Arduino.h>
#include <mcp_can.h>
#include <mcp_can_dfs.h>
#define COMMAND 0xFE
#define CLEAR 0x01
#define LINE0 0x80
#define LINE1 0xC0
#define CANint 2
#define LED2 8
#define LED3 7
#define NOP __asm__ ("nop\n\t")
// Variables for StatusMIL
bool checkEngineMIL;
bool checkEngineBL;
byte engTemp;
byte odo;
bool oilPressure;
bool lowWaterMIL;
bool batChargeMIL;
bool oilPressureMIL;
// Variables for PCM
byte engRPM;
byte vehicleSpeed;
// Variables for DSC
bool dscOff;
bool absMIL;
bool brakeFailMIL;
bool etcActiveBL;
bool etcDisabled;
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200);
Serial.println("Init…");
Serial.println("Setup pins");
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(CANint, INPUT);
Serial.println("Enable pullups");
digitalWrite(LED2, LOW);
Serial.println("CAN init:");
if (CAN0.begin(CAN_500KBPS) == CAN_OK)
{
Serial.println("OK!");
}
else
{
Serial.println("fail :-(");
while (1)
{
Serial.print("Zzz… ");
delay(1000);
}
}
Serial.println("Good to go!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0}; // Always Off Array
unsigned char otmp[8] = {255,255,255,255,255,255,255,255}; // Always On Array
unsigned char statusPCM[8] = {125,0,0,0,156,0,0,0}; // Write to 201
unsigned char statusMIL[8] = {140,0,0,0,0,0,0,0}; // Write to 420
unsigned char statusDSC[8] = {0,0,0,0,0,0,0,0}; // Write to 212
unsigned char statusEPS1[8] = {0x00,0x00,0xFF,0xFF,0x00,0x32,0x06,0x81}; // Write to 200 0x00 00 FF FF 00 32 06 81
unsigned char statusEPS2[8] = {0x89,0x89,0x89,0x19,0x34,0x1F,0xC8,0xFF}; // Write to 202 0x89 89 89 19 34 1F C8 FF
unsigned char statusECU1[8] = {0x02,0x2D,0x02,0x2D,0x02,0x2A,0x06,0x81}; // Write to 215 - Unknown
unsigned char statusECU2[8] = {0x0F,0x00,0xFF,0xFF,0x02,0x2D,0x06,0x81}; // Write to 231 - Unknown
unsigned char statusECU3[8] = {0x04,0x00,0x28,0x00,0x02,0x37,0x06,0x81}; // Write to 240 - Unknown
unsigned char statusECU4[8] = {0x00,0x00,0xCF,0x87,0x7F,0x83,0x00,0x00}; // Write to 250 - Unknown
/*
215 02 2D 02 2D 02 2A 06 81 // Some ECU status
231 0F 00 FF FF 02 2D 06 81 // Some ECU status
240 04 00 28 00 02 37 06 81 // Some ECU status
250 00 00 CF 87 7F 83 00 00 // Some ECU status
*/
void updateMIL()
{
statusMIL[0] = engTemp;
statusMIL[1] = odo;
statusMIL[4] = oilPressure;
if (checkEngineMIL == 1)
{
statusMIL[5] = statusMIL[5] | 0b01000000;
}
else
{
statusMIL[5] = statusMIL[5] & 0b10111111;
}
if (checkEngineBL == 1)
{
statusMIL[5] = statusMIL[5] | 0b10000000;
}
else
{
statusMIL[5] = statusMIL[5] & 0b01111111;
}
if (lowWaterMIL == 1)
{
statusMIL[6] = statusMIL[6] | 0b00000010;
}
else
{
statusMIL[6] = statusMIL[6] & 0b11111101;
}
if (batChargeMIL == 1)
{
statusMIL[6] = statusMIL[6] | 0b01000000;
}
else
{
statusMIL[6] = statusMIL[6] & 0b10111111;
}
if (oilPressureMIL == 1)
{
statusMIL[6] = statusMIL[6] | 0b10000000;
}
else
{
statusMIL[6] = statusMIL[6] & 0b01111111;
}
}
void updatePCM()
{
statusPCM[0] = engRPM;
statusPCM[4] = vehicleSpeed;
}
void updateDSC()
{
if (dscOff == 1)
{
statusDSC[3] = statusDSC[3] | 0b00000100;
}
else
{
statusDSC[3] = statusDSC[3] & 0b01111011;
}
if (absMIL == 1)
{
statusDSC[4] = statusDSC[4] | 0b00001000;
}
else
{
statusDSC[4] = statusDSC[4] & 0b11110111;
}
if (brakeFailMIL == 1)
{
statusDSC[4] = statusDSC[4] | 0b01000000;
}
else
{
statusDSC[4] = statusDSC[4] & 0b10111111;
}
if (etcActiveBL == 1)
{
statusDSC[5] = statusDSC[5] | 0b00100000;
}
else
{
statusDSC[5] = statusDSC[5] & 0b11011111;
}
if (etcDisabled == 1)
{
statusDSC[5] = statusDSC[5] | 0b00010000;
}
else
{
statusDSC[5] = statusDSC[5] & 0b11101111;
}
}
void loop()
{
// StatusMIL
engTemp = 145;
odo = 0;
oilPressure = 1; // Either 0 (fault) or >=1 (Ok)
checkEngineMIL = 0;
checkEngineBL = 0;
lowWaterMIL = 0;
batChargeMIL = 0;
oilPressureMIL = 0;
updateMIL();
CAN0.sendMsgBuf(0x420, 0, 8, statusMIL);
delay(10);
// StatusPCM
engRPM = 60; // RPM Value*67 gives 8500 RPM Reading Redline is 127
vehicleSpeed = 93; // Speed Value=0.63*(Speed)+38.5
updatePCM();
CAN0.sendMsgBuf(0x201, 0, 8, statusPCM); //CAN0.sendMsgBuf(CAN_ID, Data Type (normally 0), length of data, Data
delay(10);
// StatusDSC
dscOff = 0;
absMIL = 0;
brakeFailMIL = 0;
etcActiveBL = 0; // Only works with dscOff set
etcDisabled = 0; // Only works with dscOff set
updateDSC();
CAN0.sendMsgBuf(0x212, 0, 8, statusDSC);
delay(10);
/*
CAN0.sendMsgBuf(0x200, 0, 8, statusEPS1);
delay(10);
CAN0.sendMsgBuf(0x202, 0, 8, statusEPS2);
delay(10);
CAN0.sendMsgBuf(0x215, 0, 8, statusECU1);
delay(10);
CAN0.sendMsgBuf(0x231, 0, 8, statusECU2);
delay(10);
CAN0.sendMsgBuf(0x240, 0, 8, statusECU3);
delay(10);
CAN0.sendMsgBuf(0x250, 0, 8, statusECU4);
delay(10);
*/
}
- Tested in loopback and get the following. It reads the same hooked to cluster or not.
MCP2515 Initialized Successfully!
MCP2515 Library Loopback Example...
Message Sent Successfully!
Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
Message Sent Successfully!
Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
Message Sent Successfully!
Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
Message Sent Successfully!
Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56