I am in the process of thinkering about making an home made equatorial mount to take deep sky images.
An equatorial mount is basically a 4 axis motorized things in which only one axis moves to compensate the movement of the earth. To achieve it the motor should move smoothly and constantly at a very low speed (around 15 degrees per hour).
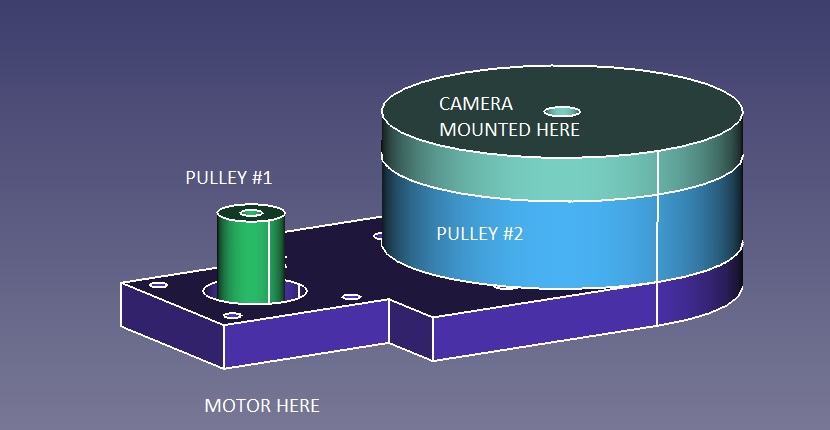
My camera + telescope weight approximately 2kg but I would like to make a solution that can handle 5kg without problems (in case of future upgrades). Based on my actual design the distance between the motor mount and telescope is ~8cm with a gear ratio between pulley #1 and #2 of around ~4. I am planning to operate it at 12/24V.
I have a few experiences with steppers but unfortunately I have never used a DC motor (with Arduino).
As we know steppers motors moves with steps so from a logical point of view they have already lost at the beginning in this case but using reduction gears they can actually be used (and they are used by other DIY and some commercial equipment).
At the beginning I was going to use the 17HS4401 stepper, which has these characteristics:
I would have used it with a worm gear without microstepping
Then I have been tempted by DC motor with/without encoder.
I assume that the principal advantage of a DC motor is that you want the motion to be as smooth as possible. That could work if you could contrive the gearing so that the motor is running all the time. If it has to stop, you're no better off than using a stepper I suspect. I'd want an encoder so as to be able to adjust the PWM to fine tune the speed.
Personally, I'd use a stepper. What do the majority of the commercial offerings use?
What do the majority of the commercial offerings use?
DC motor
Yes, if the DC motor is used it needs to run continuously without stopping. But, since I need very slow speed (1 turn every 24hours), is it really possible to find so slow DC motors?
The best I have found is 5rpm, which are 7200 turns per day. I can play with the gear ratio but I can't achieve something like this
I think using a DC motor coupled to a guide star would be a better option; a PID controller. Like using a camera pointed at a guide star; guide star centered and locked on, guide star drifts, motors compensate for drift.
MarkT:
With a servo loop a DC motor can be as slow as you want, but you are limited by the encoder resolution.
I can slow it down, but won't I loose also torque?
I also wasn't able to find any information on these cheap
AliExpress encoders. I would need to buy one and run some tests
aster94:
I can slow it down, but won't I loose also torque?
Not with a servomotor, they use control loops for position control or speed control or torque control or hybrids of the same. Industrial ones are expensive though(*). Adding control loop is how to turn a motor + encoder into a servomotor.
I also wasn't able to find any information on these cheap
AliExpress encoders. I would need to buy one and run some tests