ich habe mir o.g. Aufgabe gestellt (vgl. Abbildung). Aber je tiefer ich in das Thema einsteige, desto mehr Fragen tun sich auf.
Natürlich möchte ich auch (positive) Ergebnisse sehen, die ich ohne Hilfe wohl nicht so schnell erzielen werde.
Nebenbei, ich komme aus dem Metallbereich und habe eher gar nichts mit Elektronik zu tun.
Nun zu meinen Vorstellungen:
3 E.-Magnetspulen (evtl. 3-5A) mit geblättertem Eisenkern werden über 3 PWM-Ausgänge mit 3-phasiger Wechelspannung (120° Versatz) versorgt, so dass diese sich über eine Aluminiumfläche bewegen.
Die Stromversorgung für das Arduino Duemilanove 328p sowie die Spulen soll später über ein Netzteil (evtl. 24V, 5A, DC) mit Hilfe eines Stepdown-Wandlers erfolgen.
Die Position des Wagens kann/wird durch äußere Einflüsse manuell verändert, daher soll eine Abfrage über einen Beschleunigungssensor zumindest die Bewegungsrichtung wiedergeben.
Die Positionserkennung kann recht grob sein, z.B. 10 Schritte pro Meter.
Einschränkungen:
Die Positionserkennung kann nicht optisch erfolgen!
Das Board habe ich hier schon liegen und probiere fleißig damit rum, aber das Wissen und die Erfahrung für die nötigen Komponenten fehlt mir um eine erste Test-Schaltung zu gestalten.
Das PWM-Signal (ca. 50 Hz) muß mit einem Tiefpass "geglättet" werden
Es werden 3 (volle/halbe) H-Brücken benötigt
Das Borad wird zunächst per USB/Batterie versorgt und nur die Spulen mit dem externen Netzteil.
Ich benötige im Grunde erstmal nur eine Aufzählung von Komponenten bzw. einige Verweise zu Schaltungen die mir weiterhelfen könnten. Ob Transistor, FET usw.
Ist der Wagen so der definitive oder kann er noch umgebaut werden? Ich würde die Aluminiumschiene als Laufschiene für den Wagen machen sodaß die Elektromagnete nach unten zeigen. Das gibt Dir die Möglichkeit einen kleineren und konstanteren Luftspalt zwischen Elektromagneten und Aluminiumstreifen zu haben der durch den "experimentierer" nicht beintrechtigt wird.
Du brauchst 3 Voll-H-Brücken mit denen Du die Spulen versorgst.
Die mußt Du jede H-Brücke mit einem dem Sinusförmigen angenäherten PWM - Signal ansteuern Die Frequenz sollte höher als 490 Hz sein, da du sonst nur 5 Pulse pro Halbwelle hast. 5 bis 10 Khz sollten es schon sein.
Die 3 H-Brücken haben ein 120 Grad versetztes Signal.
Anstatt eines PWM Ansteuerung kannst Du auch einen Schrittmotortreiber mit Microstepping nehmen. Der emuliert auch einen Sinusförmigen Spannungsverlauf.
Damit Du unabhängig bist nimmst Du besser 3 davon und benutzt nur einen Kanal.
Wenn Du den von POLOLU mir dem a4983 nimmst, hannst Du den Strom bis 2A einstellen. http://www.watterott.com/de/Pololu-A4983-Schrittmotortreiber?x8551e=8qri2lsrpijf5nhpli9iih9kk5
Mit dem Microsteppingtreiber brauchst Du eine größere Spannung als nur mit der Spule alleine, da dieser den Strom durch die Spule regeln muß und der Strom nicht durch die Spule begrenzt werden darf weil die Spannug zu klein ist.
Da mußt Du beim Einschalten einige Schritte leer machen lassen damit Du die Phasenverschiebung von 120 Grad bekommst. Einmal den Versatz eingestellet brauchst du nur mehr die Impulse an alle 3 Treiber zu senden.
Der Wirkungsgrad des Linearmotor wird besser wenn Du:
Hinter den Spulen die 3 Eisenkerne mit einem geblättertem Eisenstab verbindest damit der Magnetfluß stärker ist.
hinter dem Aluminumblech ein weiteres Eisenklech gibst
Wenn Du auf die Schiene Magnete mit jeweils N und S pol abwechselnd klebst, dann wird es ein Synchronmotor.
Positionserkennung mit einem Encoder an einem Rad; oder brauchst Du eine absolute Positionsbestimmung?
vielen Dank für die Infos. Das Hilft mir schon weiter!
uwefed:
Anstatt eines PWM Ansteuerung kannst Du auch einen Schrittmotortreiber mit Microstepping nehmen.
Das ist ein guter Vorschlag. Habe mir schon den Kopf zerbrochen, wie ich möglichst einfach 3 versetzte Sinuskurven erzeuge.
Leider ist der Schrittmotortreiber gerade ausverkauft und für das größere Modell bin ich zu geizig
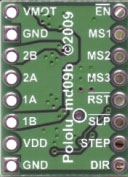
Und bei den vielen PINs am Treiber bin ich unsicher, wie ich den mit dem Arduino verbinde. Hilfestellung erbeten(siehe Anhang).
Muss ich MS1, MS2, MS3 ansteuern, zumal ich gelesen habe, dass MS1 einen Widerstand benötigt?!
uwefed:
Ist der Wagen so der definitive oder kann er noch umgebaut werden?
Nein, die Magnete werden nach unten zeigen.
uwefed:
Hinter den Spulen die 3 Eisenkerne mit einem geblättertem Eisenstab verbindest damit der Magnetfluß stärker ist.
Also wie ein "E"?
Z.B. viele "E" aus einer Tafel auslasern und übereinander schichten.
Positionserkennung mit einem Encoder an einem Rad; oder brauchst Du eine absolute Positionsbestimmung?
In der Nähe befinden sich leider keine mechanischen Bauteile wo ich ein Signal beziehen könnte, daher vllt. in Abständen kleine Magnete auf die Schiene die ich über ein Magnetometer abfrage.
Aber da wird es sicherlich zu Problemen durch die drei Spulen kommen?!
Nein, eine relative Positionserkennung reicht, da es einen Nullpunkt geben wird.
zum Treiber:
GND und Vdd sind Masse und 5V,
Vmot ist Versorgungspannung für den Motor
1A und 1B eine Spule des Motors
2A und 2B zweite Spule des Motors
MS1, MS2, MS3 stellt man die Microschritte ein; einfach alle auf 5V legen; oder M2 mir M1 verbinden dann hast Du 16tel Schritte.
SLP mit RST verbinden
DIR kannst Du auf Masse schließen (brauchst Du nicht).
mit STEP machst Du einen Schritt weiter. http://www.pololu.com/picture/view/0J2681
Blech: Ja ein E. Du weißt schon, daß das Blech ein spezielle Eisen-Siliziumlegierung ist, die einen hohen elektrischen Widerstand hat und hart und etwas spröde ist.
in Abständen kleine Magnete auf die Schiene die ich über ein Magnetometer abfrage.
Aber da wird es sicherlich zu Problemen durch die drei Spulen kommen?!
Ich befürchte daß das Magnetfeld für die fortbewegung eine magnetische Positionsbestimmung nicht zuläßt; Außerdem würden Magnete auf der Aluminiumschiene den Motor zu einem quasi Synchronmotor machen.
Erklär bitte warum hast Du keine Räder hast oder auch optische messungen schließt Du aus.