We are building one rotary delta based robot and for that we are using NEMA23 motors (23HS8630).
As test we have connected the arms directly to the motor shaft but it looks like that the motor is too weak to pull this without gearbox. Overall weight of the arms and load is around 2.2 KG and its normal that this can not be done without gearbox but we was hoping that it would be possible to pull at least 400grams on bicep end ( shorter hand ).... At te moment, this is not the case.
Motor is struggling to pull load of 350 grams on biceps end ( everything else is dismantled )... But if i lower it down to 200grams, motor will pull this weight under one second, which is OK.
Our goal is to get this speed but with 2.2kg weight ( all rods + robot head )
My question would be:
how can i calculate which motor and which gearbox do i have to use to
come near this 2.2kg in one second ratio ?
it would be great if i can use NEMA23 for this but i guess it will be too weak for this setup...
If you post a simple diagram to show what you are trying to do it will make it much easier to help you.
Also post a link to the datasheet for the stepper motor, and the stepper motor driver and tell us what stepper motor power supply you have (volts and amps).
If you post a simple diagram to show what you are trying to do it will make it much easier to help you.
*** I can do more than that :-). This is the photo of our test robot and this are dimensions:
Robot:
Basic calulations for rotary setup:
TECHNICAL STUFF:
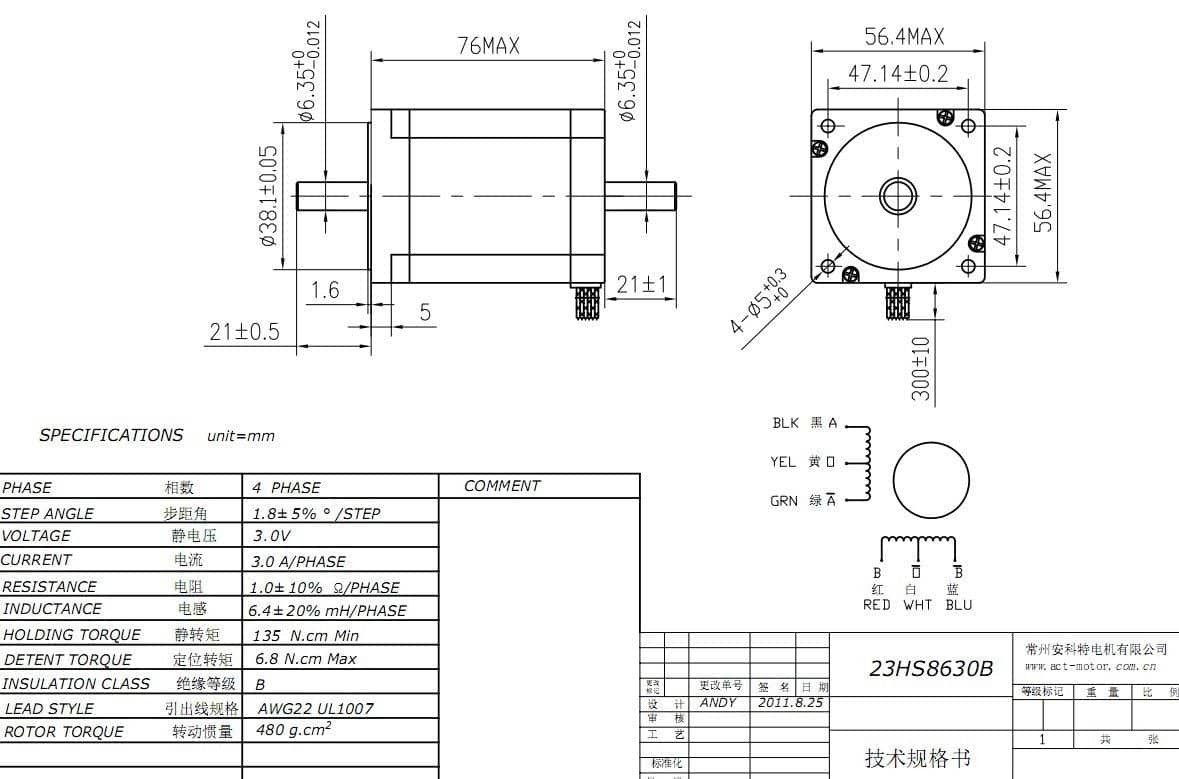
Motors --> NEMA 23 double axis, 3A ( 23HS8630 ) , green/black , red/blue
Smaller arm length --> 30 cm , weigth 80 gramms
Longer arm length -->100 cm , weigth 60 gramms
Full weight of head and arms --> 2,2 kg
Power supply for motors --> 24V / 5 A ( will be changed to 10A )
CONTROLLER:
DUET3D board ( max power is limited to 2A ) but with external driver it can go to 6A
Motor datasheet:
in attach
Goal
This is my goal but with our robot and with upper dimensions.
In my Reply #1 I asked you to post a diagram, not a photo. I want to understand how the machine is intended to work and where the forces act. A very simple drawing of a single limb and motor will be sufficient.
And you have not posted a link to the motor driver or given details of the motor power supply.
I want to understand how the machine is intended to work and where the forces act.
*** The machine should work like the machine from the youtube video.
I will draw basic movements and angles but machine should move like in this video.
Motor power supply:
*** All 3 motors are powered from one PC PSU, 24V / 5A.
This power supply will be changed with 24/10A PSU.
If you have bought stepper drivers that require 3 amps it seems pointless to power them with an expensive driver that can only provide 2 amps. And I don't see any heat sinks on the stepper driver chips so I wonder can they provide 2 amps continuously - and stepper motors draw full power all the time, even when stationary.
From looking at the video the torque required of the motors looks like it should be easy to calculate - and the motors in the video look big.
The better motor manufacturers have graphs that show how the torque varies with speed.
If you have bought stepper drivers that require 3 amps it seems pointless to power them with an expensive driver that can only provide 2 amps. *** The reason we bought this board was the simplicity and functionality. Board has many great options but yes, it's limited to 2,4A. There are options to update firmware and HW, so this "update" part should not be a problem.
From looking at the video the torque required of the motors looks like it should be easy to calculate - and the motors in the video look big *** According to your post, i presume you have worked with such systems and thefore your calculation is more then welcome.
a.) Should we use NEMA23 or stronger motor ?
b.) What kind of gearbox would you suggest to lift those 2,5KG in one second ?
arnix:
a.) Should we use NEMA23 or stronger motor ?
All Nema23 tells you is that the front face of the motor measures 2.3 inches. It tells you nothing about the motor performance.
You need to calculate the torque required (taking account of any gearing you have) and then get a motor that can provide that torque at the speed you want the motor to work. Hence the need to see the motor performance graph. Torque declines sharply as speed increases.
b.) What kind of gearbox would you suggest to lift those 2,5KG in one second ?
It is not possible to answer that question. You need to consider the motor and gearbox together. A reduction gearbox will increase the torque and reduce the speed.