I did try configuring the Mega with the module disconnected from the bus wires, but it still fails to enter Configuration Mode.
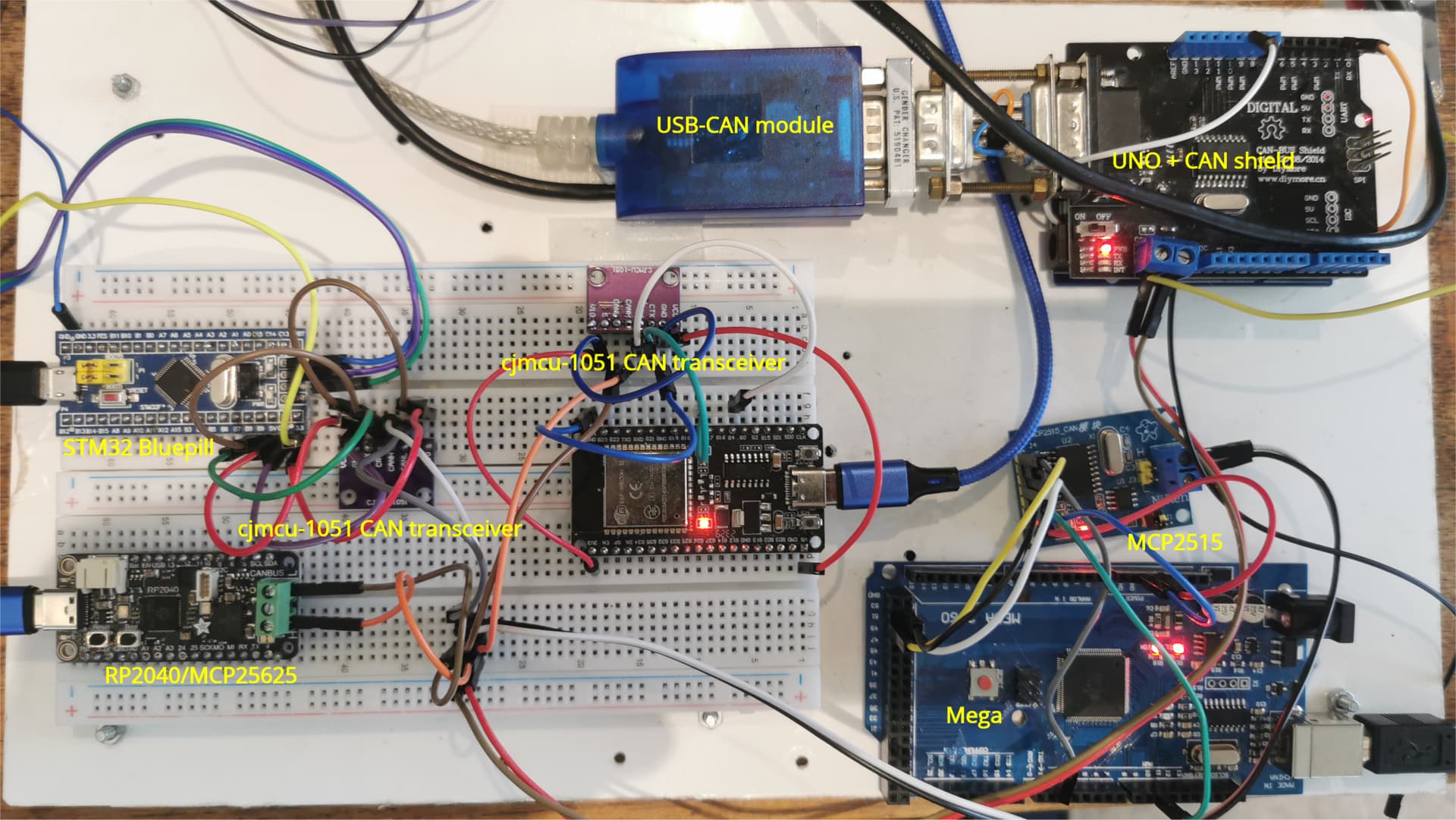
I’m sharing both the UNO version and the Mega version of the code
Mega Loopback test code
/* CAN Loopback Example
* This example sends a message once a second and receives that message
* no CAN bus is required. This example will test the functionality
* of the protocol controller, and connections to it.
*
* Written By: Cory J. Fowler - October 5th 2016
*/
#include <mcp_can.h>
#include <SPI.h>
// CAN TX Variables
unsigned long prevTX = 0; // Variable to store last execution time
const unsigned int invlTX = 1000; // One second interval constant
byte data[] = {0xAA, 0x55, 0x01, 0x10, 0xFF, 0x12, 0x34, 0x56}; // Generic CAN data to send
// CAN RX Variables
long unsigned int rxId;
unsigned char len;
unsigned char rxBuf[8];
// Serial Output String Buffer
char msgString[128];
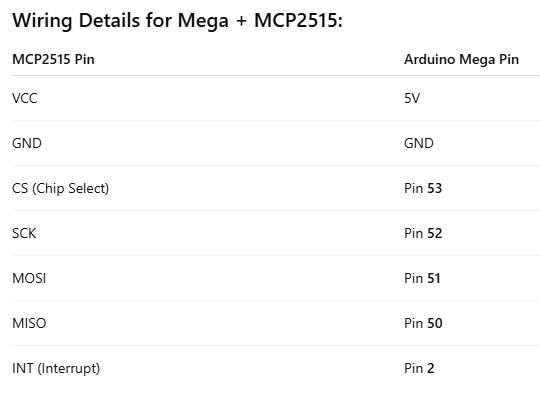
// CAN0 INT and CS
#define CAN0_INT 2 // Set INT to pin 2
MCP_CAN CAN0(53); // Set CS to pin 10
void setup()
{
Serial.begin(115200); // CAN is running at 500,000BPS; 115,200BPS is SLOW, not FAST, thus 9600 is crippling.
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
// Since we do not set NORMAL mode, we are in loopback mode by default.
//CAN0.setMode(MCP_NORMAL);
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Loopback Example...");
}
void loop()
{
if(!digitalRead(CAN0_INT)) // If CAN0_INT pin is low, read receive buffer
{
CAN0.readMsgBuf(&rxId, &len, rxBuf); // Read data: len = data length, buf = data byte(s)
if((rxId & 0x80000000) == 0x80000000) // Determine if ID is standard (11 bits) or extended (29 bits)
sprintf(msgString, "Extended ID: 0x%.8lX DLC: %1d Data:", (rxId & 0x1FFFFFFF), len);
else
sprintf(msgString, "Standard ID: 0x%.3lX DLC: %1d Data:", rxId, len);
Serial.print(msgString);
if((rxId & 0x40000000) == 0x40000000){ // Determine if message is a remote request frame.
sprintf(msgString, " REMOTE REQUEST FRAME");
Serial.print(msgString);
} else {
for(byte i = 0; i<len; i++){
sprintf(msgString, " 0x%.2X", rxBuf[i]);
Serial.print(msgString);
}
}
Serial.println();
}
if(millis() - prevTX >= invlTX){ // Send this at a one second interval.
prevTX = millis();
byte sndStat = CAN0.sendMsgBuf(0x100, 8, data);
if(sndStat == CAN_OK)
Serial.println("Message Sent Successfully!");
else
Serial.println("Error Sending Message...");
}
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
Output I checked, and the serial output only appears correctly at 9600 baud, even though the code has Serial.begin(115200);.
Entering Configuration Mode Failure...
Configuration Mode Failure...
Uno version
code
/* CAN Loopback Example
* This example sends a message once a second and receives that message
* no CAN bus is required. This example will test the functionality
* of the protocol controller, and connections to it.
*
* Written By: Cory J. Fowler - October 5th 2016
*/
#include <mcp_can.h>
#include <SPI.h>
// CAN TX Variables
unsigned long prevTX = 0; // Variable to store last execution time
const unsigned int invlTX = 1000; // One second interval constant
byte data[] = {0xAA, 0x55, 0x01, 0x10, 0xFF, 0x12, 0x34, 0x56}; // Generic CAN data to send
// CAN RX Variables
long unsigned int rxId;
unsigned char len;
unsigned char rxBuf[8];
// Serial Output String Buffer
char msgString[128];
// CAN0 INT and CS
#define CAN0_INT 2 // Set INT to pin 2
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200); // CAN is running at 500,000BPS; 115,200BPS is SLOW, not FAST, thus 9600 is crippling.
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
// Since we do not set NORMAL mode, we are in loopback mode by default.
//CAN0.setMode(MCP_NORMAL);
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Loopback Example...");
}
void loop()
{
if(!digitalRead(CAN0_INT)) // If CAN0_INT pin is low, read receive buffer
{
CAN0.readMsgBuf(&rxId, &len, rxBuf); // Read data: len = data length, buf = data byte(s)
if((rxId & 0x80000000) == 0x80000000) // Determine if ID is standard (11 bits) or extended (29 bits)
sprintf(msgString, "Extended ID: 0x%.8lX DLC: %1d Data:", (rxId & 0x1FFFFFFF), len);
else
sprintf(msgString, "Standard ID: 0x%.3lX DLC: %1d Data:", rxId, len);
Serial.print(msgString);
if((rxId & 0x40000000) == 0x40000000){ // Determine if message is a remote request frame.
sprintf(msgString, " REMOTE REQUEST FRAME");
Serial.print(msgString);
} else {
for(byte i = 0; i<len; i++){
sprintf(msgString, " 0x%.2X", rxBuf[i]);
Serial.print(msgString);
}
}
Serial.println();
}
if(millis() - prevTX >= invlTX){ // Send this at a one second interval.
prevTX = millis();
byte sndStat = CAN0.sendMsgBuf(0x100, 8, data);
if(sndStat == CAN_OK)
Serial.println("Message Sent Successfully!");
else
Serial.println("Error Sending Message...");
}
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
output
Entering Configuration Mode Successful!
Setting Baudrate Successful!
MCP2515 Initialized Successfully!
Message Sent Successfully!
Message Sent Successfully!