Hi all,
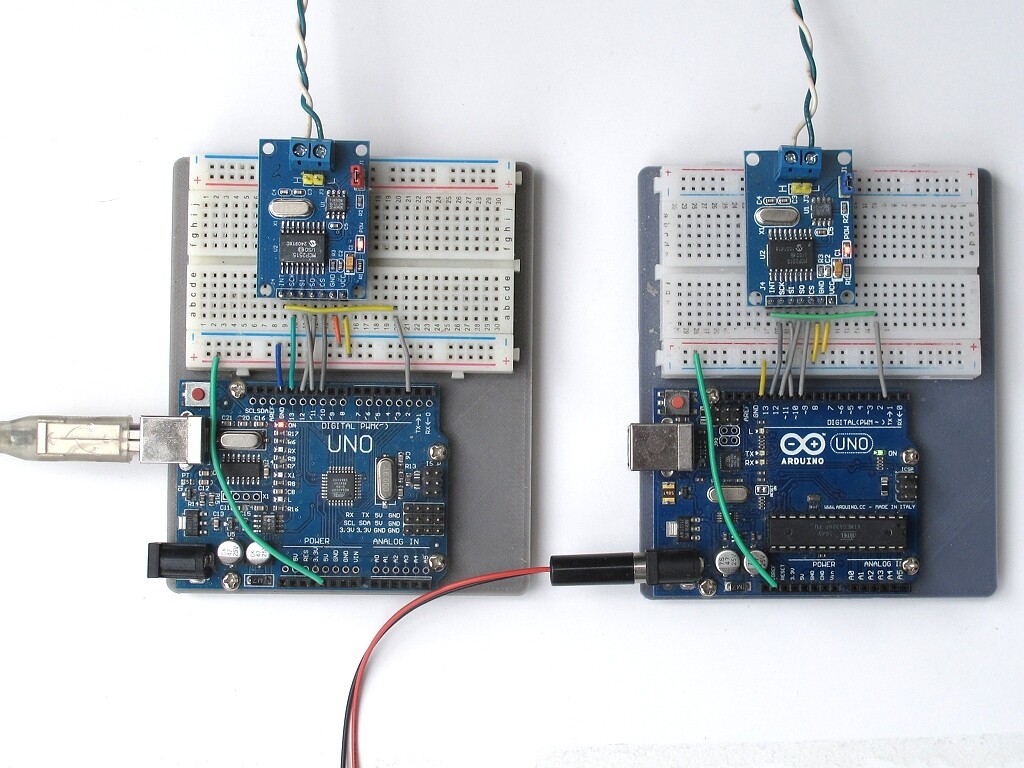
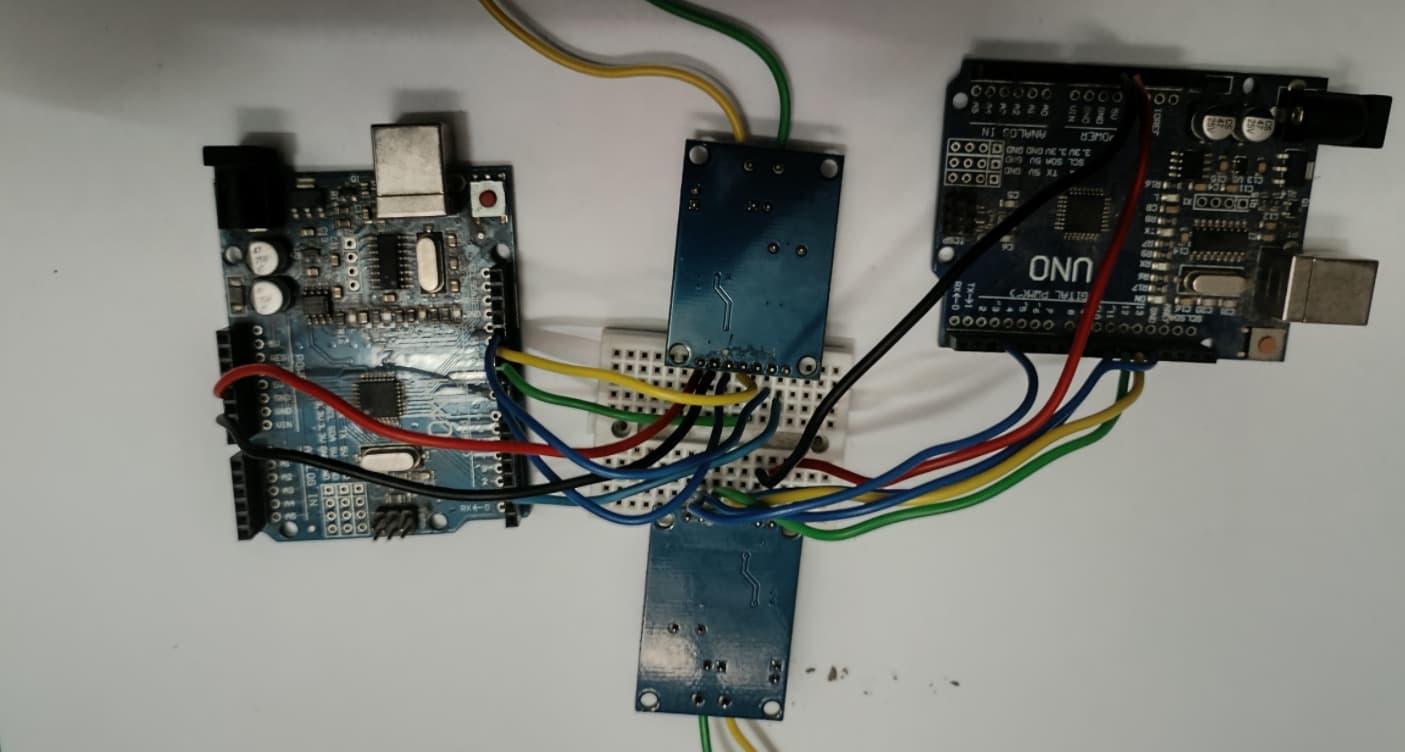
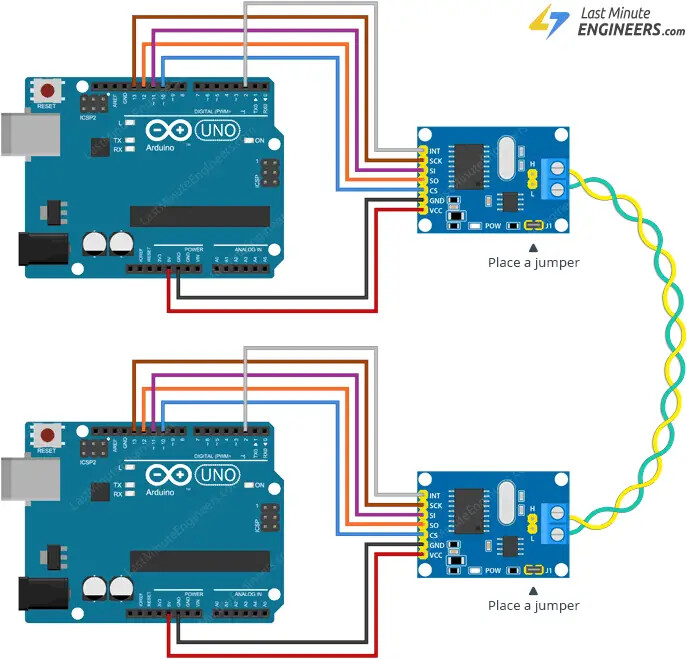
I'm working with two MCP2515 CAN modules connected to Arduino Uno boards one as sender, one as receiver. Wiring is okay — MISO, MOSI, SCK, CS, are properly connected. CANH and CANL are linked between both modules, with 120Ω termination resistors at each end. Ground is shared. I'm using the "send" and "receive" example codes from the mcp_can library.
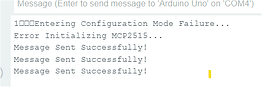
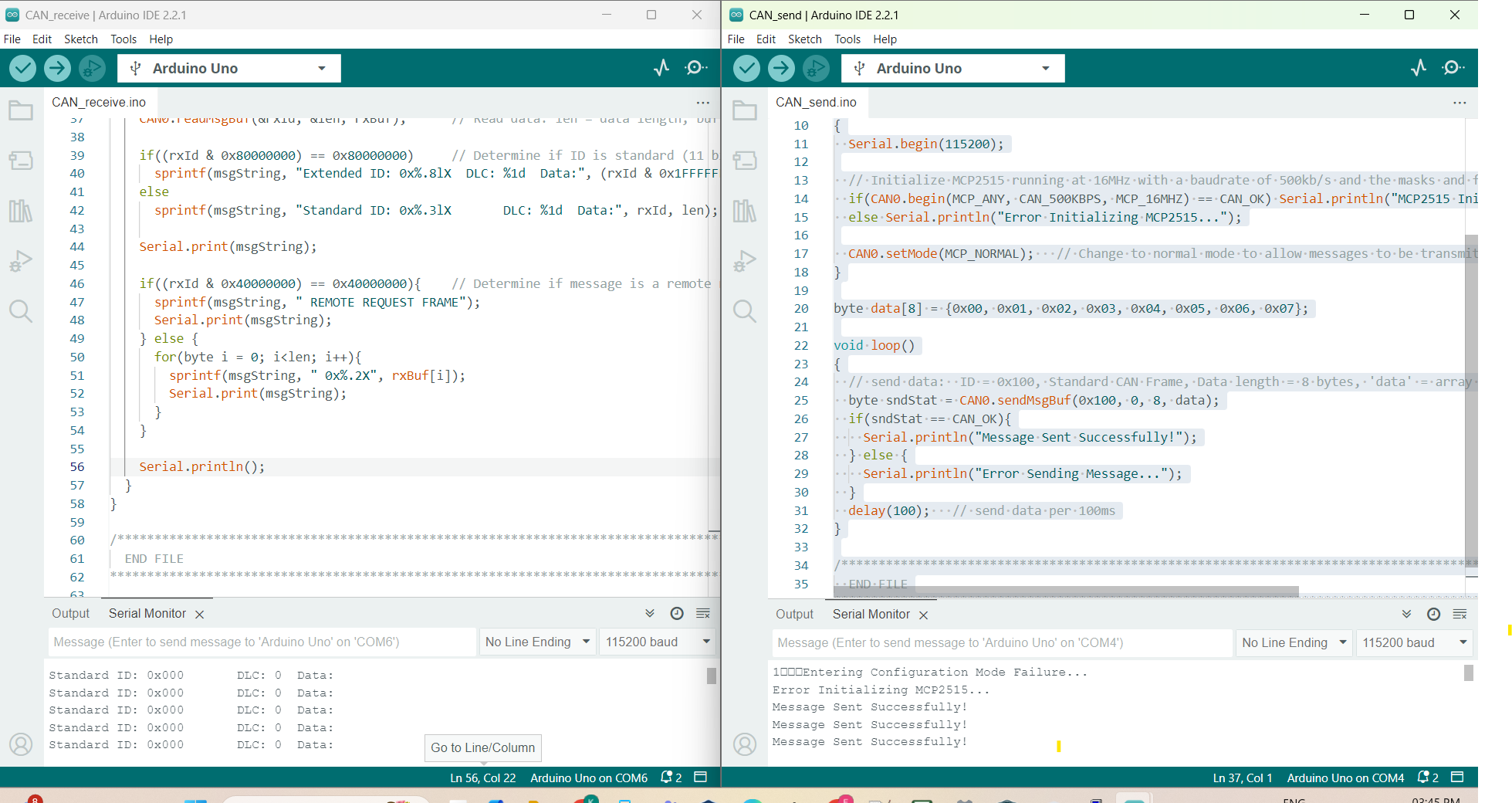
The sender shows:
The sender shows:
Message Sent Successfully!
But the receiver continuously shows:
Standard ID: 0x000 DLC: 0 Data:
Even though I expect messages with ID 0x100 and 8 bytes of data.
While debugging, I noticed the following line in both sender and receiver code:
CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_16MHZ);
However, on inspecting the MCP2515 module, I realized the crystal oscillator is actually 8 MHz, not 16 MHz. so I changed it to:
CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ);
but I still get ID: 0x000 with zero-length data on the receiver.
sender code
// CAN Send Example
//
#include <mcp_can.h>
#include <SPI.h>
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200);
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK) Serial.println("MCP2515 Initialized Successfully!");
else Serial.println("Error Initializing MCP2515...");
CAN0.setMode(MCP_NORMAL); // Change to normal mode to allow messages to be transmitted
}
byte data[8] = {0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07};
void loop()
{
// send data: ID = 0x100, Standard CAN Frame, Data length = 8 bytes, 'data' = array of data bytes to send
byte sndStat = CAN0.sendMsgBuf(0x100, 0, 8, data);
if(sndStat == CAN_OK){
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(100); // send data per 100ms
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
Receiver code
// CAN Receive Example
//
#include <mcp_can.h>
#include <SPI.h>
long unsigned int rxId;
unsigned char len = 0;
unsigned char rxBuf[8];
char msgString[128]; // Array to store serial string
#define CAN0_INT 2 // Set INT to pin 2
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200);
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
CAN0.setMode(MCP_NORMAL); // Set operation mode to normal so the MCP2515 sends acks to received data.
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Receive Example...");
}
void loop()
{
if(!digitalRead(CAN0_INT)) // If CAN0_INT pin is low, read receive buffer
{
CAN0.readMsgBuf(&rxId, &len, rxBuf); // Read data: len = data length, buf = data byte(s)
if((rxId & 0x80000000) == 0x80000000) // Determine if ID is standard (11 bits) or extended (29 bits)
sprintf(msgString, "Extended ID: 0x%.8lX DLC: %1d Data:", (rxId & 0x1FFFFFFF), len);
else
sprintf(msgString, "Standard ID: 0x%.3lX DLC: %1d Data:", rxId, len);
Serial.print(msgString);
if((rxId & 0x40000000) == 0x40000000){ // Determine if message is a remote request frame.
sprintf(msgString, " REMOTE REQUEST FRAME");
Serial.print(msgString);
} else {
for(byte i = 0; i<len; i++){
sprintf(msgString, " 0x%.2X", rxBuf[i]);
Serial.print(msgString);
}
}
Serial.println();
}
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
I'm attaching a snapshot of the receiver’s serial output below.
When I connect int pin receiver show