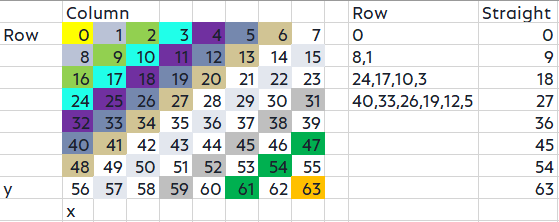
Additionally to the great explaination above, it helped me to draw the matrix in Excel:
And here is my (not cleaned up) code:
#define PIN_DIN 12
#define PIN_CLK 11
#define PIN_CS 10
#define NUM_DEVICES 2
#include <LedControl.h>
LedControl lc = LedControl(PIN_DIN, PIN_CLK, PIN_CS, NUM_DEVICES);
#define Matrix_Width 8
#define Matrix_Heigth 8
#define PIN_Tilt 5
#define LedMatrixAttached 1
#define Speedup 0
bool top[Matrix_Width][Matrix_Heigth];
bool bottom[Matrix_Width][Matrix_Heigth];
enum Orientations
{
TopBottom = 0,
BottomTop = 1
} orientation = TopBottom;
typedef enum {
Top = 0,
Bottom = 1
} Glass;
const int maxIterations = 513;
int counter = 0;
int blinkCounter = 0;
unsigned long startTime = 0;
unsigned long lastDebounceTime = 0;
unsigned long debounceDelay = 50;
void setup() {
Serial.begin(115200);
pinMode(PIN_Tilt, INPUT_PULLUP);
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
randomSeed(analogRead(0));
SetupMatrix();
}
void loop() {
PhysicLoop();
}
void SetupMatrix() {
for (int index = 0; index < lc.getDeviceCount(); index++) {
lc.shutdown(index, false);
lc.setIntensity(index, 2);
lc.clearDisplay(index);
}
orientation = (digitalRead(PIN_Tilt) > 0) ? BottomTop : TopBottom;
CheckTilt();
ResetMatrix();
}
void ResetMatrix() {
SetAll(GetGlass(Top), orientation == TopBottom);
SetAll(GetGlass(Bottom), orientation == BottomTop);
counter = 0;
startTime = 0;
blinkCounter = 0;
}
void PhysicLoop() {
CheckTilt();
if (startTime == 0)
startTime = millis();
if (counter >= maxIterations + 1) {
EndBlink();
return;
} else
counter++;
bool topTick = IterateRows(Top);
bool bottomTick = IterateRows(Bottom);
bool transferGrain;
if (!topTick && !bottomTick)
transferGrain = TransferPixel();
if (!topTick && !bottomTick && !transferGrain) {
EndClock();
return;
}
#if !LedMatrixAttached
Print();
#endif
if (CheckGlasses())
counter = 1000;
#if Speedup
delay(100);
return;
#endif
int iterations = 513;
unsigned long duration = 60000 * 15;
const int runtime = 1538;
delay((duration - runtime) / iterations);
}
bool TransferPixel() {
bool topValue = GetValue(Top, Matrix_Width + Matrix_Heigth - 2, 0);
bool bottomValue = GetValue(Bottom, 0, 0);
if (topValue && !bottomValue)
CopyPixel(Top, Matrix_Width + Matrix_Heigth - 2, 0, Bottom, 0, 0);
return topValue && !bottomValue;
}
bool IterateRows(uint8_t glass) {
bool prevLineHasValues = false;
for (uint8_t i = 0; i < Matrix_Heigth + Matrix_Width - 1; i++) {
bool lineFilled = IsLineFilled(glass, i);
bool lineHasGaps = lineFilled ? HasLineGap(glass, i) : true;
bool nextLineHasGaps = i < Matrix_Heigth + Matrix_Width - 1 ? HasLineGap(glass, i + 1) : false;
bool ticked = false;
if (prevLineHasValues && lineHasGaps)
ticked = FillGapFromAbove(glass, i);
if (lineFilled && lineHasGaps && nextLineHasGaps)
ticked = FillGapBelow(glass, i);
//only one tick per iteration
if (ticked)
return true;
prevLineHasValues = lineFilled;
}
return false;
}
bool FillGapFromAbove(uint8_t glass, uint8_t row) {
uint8_t columns[Matrix_Width];
uint8_t NoOfColums = GetRow(row - 1, columns);
uint8_t colPrev;
NoOfColums = GetRow(row, columns);
uint8_t colCurr;
for (colCurr = 0; colCurr < NoOfColums; colCurr++) {
bool value = GetValue(glass, row, colCurr);
if (!value)
break;
}
colPrev = GetNextPixel(glass, row - 1, row, colCurr, true);
CopyPixel(glass, row - 1, colPrev, glass, row, colCurr);
return true;
}
bool FillGapBelow(uint8_t glass, uint8_t row) {
uint8_t columns[Matrix_Width];
uint8_t NoOfColums = GetRow(row + 1, columns);
uint8_t colNext;
uint8_t colCurr;
NoOfColums = GetRow(row, columns);
for (colCurr = 0; colCurr < NoOfColums; colCurr++)
if (GetValue(glass, row, colCurr))
break;
colNext = GetNextPixel(glass, row + 1, row, colCurr, false);
//Line below already full:
if (GetValue(glass, row + 1, colNext))
return false;
CopyPixel(glass, row, colCurr, glass, row + 1, colNext);
return true;
}
bool IsLineFilled(uint8_t glass, uint8_t row) {
uint8_t columns[Matrix_Width];
uint8_t NoOfColums = GetRow(row, columns);
for (uint8_t i = 0; i < NoOfColums; i++) {
bool value = GetValue(glass, row, i);
if (value)
return true;
}
return false;
}
bool HasLineGap(uint8_t glass, uint8_t row) {
uint8_t columns[Matrix_Width];
uint8_t NoOfColums = GetRow(row, columns);
for (uint8_t i = 0; i < NoOfColums; i++) {
bool value = GetValue(glass, row, i);
if (!value)
return true;
}
return false;
}
uint8_t GetGlass(uint8_t glass) {
if (orientation == TopBottom)
return glass == Top ? 0 : 1;
return glass == Top ? 1 : 0;
}
void Print() {
PrintMatrix(Top);
PrintMatrix(Bottom);
}
void PrintMatrix(uint8_t glass) {
uint8_t no = GetGlass(glass);
switch (no) {
case 0:
PrintArray(top);
break;
case 1:
PrintArray(bottom);
break;
}
}
void PrintArray(bool arr[Matrix_Heigth][Matrix_Width]) {
for (int i = 0; i < Matrix_Heigth + Matrix_Width - 1; i++) {
int startRow = max(0, i - Matrix_Width + 1);
int startCol = min(i, Matrix_Width - 1);
int numElements = min(i + 1, Matrix_Heigth - startRow);
for (uint8_t space = 0; space < Matrix_Width - numElements; space++)
Serial.print(" ");
for (int j = 0; j < numElements; j++) {
int x = startRow + j;
int y = startCol - j;
int value = arr[x][y];
Serial.print(value ? "X" : "0");
Serial.print(" ");
}
Serial.println();
}
}
void SetAll(uint8_t glass, bool state) {
for (int y = 0; y < Matrix_Heigth; y++)
for (int x = 0; x < Matrix_Width; x++)
SetPixelByCoordinates(glass, x, y, state);
}
void CopyPixel(uint8_t glassFrom, uint8_t rowFrom, uint8_t colFrom, uint8_t glassTo, uint8_t rowTo, uint8_t colTo) {
bool state = GetValue(glassFrom, rowFrom, colFrom);
SetPixel(glassFrom, rowFrom, colFrom, !state);
SetPixel(glassTo, rowTo, colTo, state);
}
void CopyPixelByCoordinates(uint8_t glassFrom, uint8_t xFrom, uint8_t yFrom, uint8_t glassTo, uint8_t xTo, uint8_t yTo) {
SetPixelByCoordinates(glassFrom, xFrom, yFrom, false);
SetPixelByCoordinates(glassTo, xTo, yTo, true);
}
void SetPixel(uint8_t glass, uint8_t row, uint8_t col, bool state) {
uint8_t x;
uint8_t y;
GetCoordinates(row, col, x, y);
SetPixelByCoordinates(glass, x, y, state);
}
void SetPixelByCoordinates(uint8_t glass, uint8_t x, uint8_t y, bool state) {
uint8_t glassId = GetGlass(glass);
switch (glassId) {
case 0:
top[x][y] = state;
break;
case 1:
bottom[x][y] = state;
break;
}
//Invert matrixes...
lc.setLed(glassId ? 0 : 1, x, y, state);
}
void GetCoordinates(uint8_t row, uint8_t col, uint8_t& x, uint8_t& y) {
if (orientation == BottomTop)
row = (Matrix_Width + Matrix_Heigth - 2) - row;
int startRow = max(0, row - Matrix_Width + 1);
int startCol = min(row, Matrix_Width - 1);
int numElements = min(row + 1, Matrix_Heigth - startRow);
x = startRow + col;
y = startCol - col;
}
void PrintPixel(uint8_t glass, uint8_t row, uint8_t col) {
uint8_t x;
uint8_t y;
GetCoordinates(row, col, x, y);
bool value;
switch (GetGlass(glass)) {
case 0:
value = top[x][y];
break;
case 1:
value = bottom[x][y];
break;
}
Serial.print(value ? "X" : "0");
Serial.print(" (" + String(row));
Serial.print("/" + String(col));
Serial.print(") [" + String(x));
Serial.print("," + String(y));
Serial.print("]");
Serial.print(" " + String(GetLedNo(x, y)));
Serial.print(" ");
}
uint8_t GetLedNo(uint8_t x, uint8_t y) {
return x + y * Matrix_Width;
}
uint8_t GetRow(uint8_t rowNo, uint8_t *columns) {
if (orientation == BottomTop)
rowNo = (Matrix_Width + Matrix_Heigth - 2) - rowNo;
uint8_t c = 0;
int startRow = max(0, rowNo - Matrix_Width + 1);
int startCol = min(rowNo, Matrix_Width - 1);
int numElements = min(rowNo + 1, Matrix_Heigth - startRow);
for (int j = 0; j < numElements; j++) {
int row = startRow + j;
int col = startCol - j;
columns[c++] = col;
}
if (c <= Matrix_Width - 1)
columns[c] = 255;
return numElements;
}
uint8_t GetNextPixel(uint8_t glass, uint8_t rowTo, uint8_t rowFrom, uint8_t colFrom, bool state) {
uint8_t colTo = 0;
uint8_t columns[Matrix_Width];
uint8_t NoOfPrevColumns = GetRow(rowFrom, columns);
uint8_t NoOfColumns = GetRow(rowTo, columns);
if (NoOfColumns <= 1)
return colTo;
//X 0
// 0
if (NoOfColumns < NoOfPrevColumns) {
if (colFrom == 0)
colTo = 0;
else if (colFrom >= NoOfColumns - 1)
colTo = NoOfColumns - 1;
else
colTo = random(colFrom - 1, colFrom + 1);
}
// 0 0
//X 0 0
if (NoOfColumns > NoOfPrevColumns) {
colTo = random(colFrom, colFrom + 2);
}
if (GetValue(glass, rowTo, colTo) == state)
return colTo;
if (colFrom > NoOfColumns - 1)
colFrom = NoOfColumns - 1;
if (random(0, 2) == 1) {
//Next
for (colTo = colFrom; colTo < NoOfColumns; colTo++)
if (GetValue(glass, rowTo, colTo) == state)
return colTo;
} else {
//Prev
for (colTo = colFrom; colTo > 0; colTo--)
if (GetValue(glass, rowTo, colTo) == state)
return colTo;
}
//Fallback:
for (colTo = 0; colTo < NoOfColumns; colTo++)
if (GetValue(glass, rowTo, colTo) == state)
return colTo;
return colTo;
}
bool GetValue(uint8_t glass, uint8_t row, uint8_t col) {
uint8_t x;
uint8_t y;
GetCoordinates(row, col, x, y);
return GetValueByCoordinates(glass, x, y);
}
bool GetValueByCoordinates(uint8_t glass, uint8_t x, uint8_t y) {
switch (GetGlass(glass)) {
case 0:
return top[x][y];
break;
case 1:
return bottom[x][y];
break;
}
}
void CheckTilt() {
int tiltValue = digitalRead(PIN_Tilt);
if((orientation == TopBottom ? LOW : HIGH) == tiltValue){
lastDebounceTime = millis();
return;
}
if ((millis() - lastDebounceTime) > debounceDelay)
orientation = tiltValue;
else
return;
digitalWrite(LED_BUILTIN, orientation == TopBottom ? LOW : HIGH);
Serial.println(orientation == TopBottom ? "Top Bottom" : "Bottom Top");
//change counter:
if(counter > 0 && counter < maxIterations)
counter = maxIterations - counter;
if (counter >= 1000)
SetupMatrix();
}
bool CheckGlasses() {
uint8_t topCounter = 0;
uint8_t bottomCounter = 0;
for (uint8_t glass = 0; glass <= 1; glass++)
for (int y = 0; y < Matrix_Heigth; y++)
for (int x = 0; x < Matrix_Width; x++)
if (GetValueByCoordinates(glass, x, y))
glass == 0 ? topCounter++ : bottomCounter++;
if (topCounter + bottomCounter != Matrix_Heigth * Matrix_Width) {
Serial.println("Failed!");
Serial.println("Top: " + String(topCounter));
Serial.println("Bottom: " + String(bottomCounter));
Serial.println("Counter: " + String(counter));
return true;
}
return false;
}
void EndClock() {
//ToDo: Blink or something...
Serial.println("End iterations: " + String(counter));
Serial.print("Millis: ");
Serial.println(millis() - startTime);
counter = 1000;
}
void EndBlink() {
#if LedMatrixAttached
if(blinkCounter == 50){
SetAll(GetGlass(Top), false);
SetAll(GetGlass(Bottom), false);
blinkCounter++;
return;
}
if(blinkCounter > 50)
return;
SetAll(Top, true);
SetAll(Bottom, true);
for(int brightness = 0; brightness <= 5; brightness++){
lc.setIntensity(Top, brightness);
lc.setIntensity(Bottom, 5 - brightness);
delay(50);
}
for(int brightness = 0; brightness <= 5; brightness++){
lc.setIntensity(Bottom, brightness);
lc.setIntensity(Top, 5 - brightness);
delay(50);
}
blinkCounter++;
#endif
}
