Hi,
What I am trying to do is whenever PIR sensor detects a motion, I want the esp32 cam to take a picture. Also GPS module(Neo-6m) should capture the location. The picture should be uploaded to firebase storage. But there is an error happening every time. I will share the code and the error.
Code
#include "WiFi.h"
#include "esp_camera.h"
#include "Arduino.h"
#include "soc/soc.h" // Disable brownout problems
#include "soc/rtc_cntl_reg.h" // Disable brownout problems
#include "driver/rtc_io.h"
#include <SPIFFS.h>
#include <FS.h>
#include <Firebase_ESP_Client.h>
//Provide the token generation process info.
#include <addons/TokenHelper.h>
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
//Replace with your network credentials
const char* ssid = "****";
const char* password = "****";
// Insert Firebase project API Key
#define API_KEY "****"
// Insert Authorized Email and Corresponding Password
#define USER_EMAIL "****"
#define USER_PASSWORD "****"
// Insert Firebase storage bucket ID e.g bucket-name.appspot.com
#define STORAGE_BUCKET_ID "*****"
// Photo File Name to save in SPIFFS
#define FILE_PHOTO "/data/photo.jpg"
RTC_DATA_ATTR int bootCount = 0;
// OV2640 camera module pins (CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
static const int RXPin = 13, TXPin = 12;
static const uint32_t GPSBaud = 9600;
TinyGPSPlus gps;
SoftwareSerial ss(RXPin, TXPin);
const int sensor = 14; // the pin that the sensor is atteched to
int pinStateCurrent = LOW; // current state of pin
int pinStatePrevious = LOW; // previous state of pin
boolean takeNewPhoto = true;
//Define Firebase Data objects
FirebaseData fbdo;
FirebaseAuth auth;
FirebaseConfig configF;
bool taskCompleted = false;
// Check if photo capture was successful
bool checkPhoto( fs::FS &fs ) {
File f_pic = fs.open( FILE_PHOTO );
unsigned int pic_sz = f_pic.size();
return ( pic_sz > 100 );
}
// Capture Photo and Save it to SPIFFS
void capturePhotoSaveSpiffs( void ) {
camera_fb_t * fb = NULL; // pointer
bool ok = 0; // Boolean indicating if the picture has been taken correctly
do {
// Take a photo with the camera
Serial.println("Taking a photo...");
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
return;
}
// Photo file name
Serial.printf("Picture file name: %s\n", FILE_PHOTO);
File file = SPIFFS.open(FILE_PHOTO, FILE_WRITE);
// Insert the data in the photo file
if (!file) {
Serial.println("Failed to open file in writing mode");
}
else {
file.write(fb->buf, fb->len); // payload (image), payload length
Serial.print("The picture has been saved in ");
Serial.print(FILE_PHOTO);
Serial.print(" - Size: ");
Serial.print(file.size());
Serial.println(" bytes");
}
// Close the file
file.close();
esp_camera_fb_return(fb);
// check if file has been correctly saved in SPIFFS
ok = checkPhoto(SPIFFS);
} while ( !ok );
}
void initWiFi() {
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("Connecting to WiFi...");
}
}
void initSPIFFS() {
if (!SPIFFS.begin(true)) {
Serial.println("An Error has occurred while mounting SPIFFS");
ESP.restart();
}
else {
delay(500);
Serial.println("SPIFFS mounted successfully");
}
}
void initCamera() {
// OV2640 camera module
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
if (psramFound()) {
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// Camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
ESP.restart();
}
}
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
ss.begin(GPSBaud);
pinMode(sensor, INPUT); // set arduino pin to input mode to read value from OUTPUT pin of sensor
initWiFi();
initSPIFFS();
// Turn-off the 'brownout detector'
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0);
initCamera();
//Firebase
// Assign the api key
configF.api_key = API_KEY;
//Assign the user sign in credentials
auth.user.email = USER_EMAIL;
auth.user.password = USER_PASSWORD;
//Assign the callback function for the long running token generation task
configF.token_status_callback = tokenStatusCallback; //see addons/TokenHelper.h
Firebase.begin(&configF, &auth);
Firebase.reconnectWiFi(true);
}
void loop() {
pinStatePrevious = pinStateCurrent; // store old state
pinStateCurrent = digitalRead(sensor); // read new state
if (pinStatePrevious == LOW && pinStateCurrent == HIGH) { // pin state change: LOW -> HIGH
Serial.println("Motion detected!");
takePic();
runGPS();
// TODO: turn on alarm, light or activate a device ... here
}
else if (pinStatePrevious == HIGH && pinStateCurrent == LOW) { // pin state change: HIGH -> LOW
Serial.println("Motion stopped!");
// TODO: turn off alarm, light or deactivate a device ... here
}
}
void takePic() {
if (takeNewPhoto) {
capturePhotoSaveSpiffs();
delay(2000);
if (Firebase.ready() && !taskCompleted) {
taskCompleted = true;
Serial.print("Uploading picture... ");
//MIME type should be valid to avoid the download problem.
//The file systems for flash and SD/SDMMC can be changed in FirebaseFS.h.
if (Firebase.Storage.upload(&fbdo, STORAGE_BUCKET_ID /* Firebase Storage bucket id */, FILE_PHOTO /* path to local file */, mem_storage_type_flash /* memory storage type, mem_storage_type_flash and mem_storage_type_sd */, FILE_PHOTO /* path of remote file stored in the bucket */, "image/jpeg" /* mime type */)) {
Serial.printf("\nDownload URL: %s\n", fbdo.downloadURL().c_str());
}
else {
Serial.println(fbdo.errorReason());
}
}
taskCompleted = false;
}
return;
}
void runGPS() {
while (ss.available() >= 0) {
gps.encode(ss.read());
if (gps.location.isUpdated()) {
Serial.print("Latitude= ");
Serial.print(gps.location.lat(), 6);
Serial.print(" Longitude= ");
Serial.println(gps.location.lng(), 6);
return;
}
else {
delay(1);
}
}
}
Error
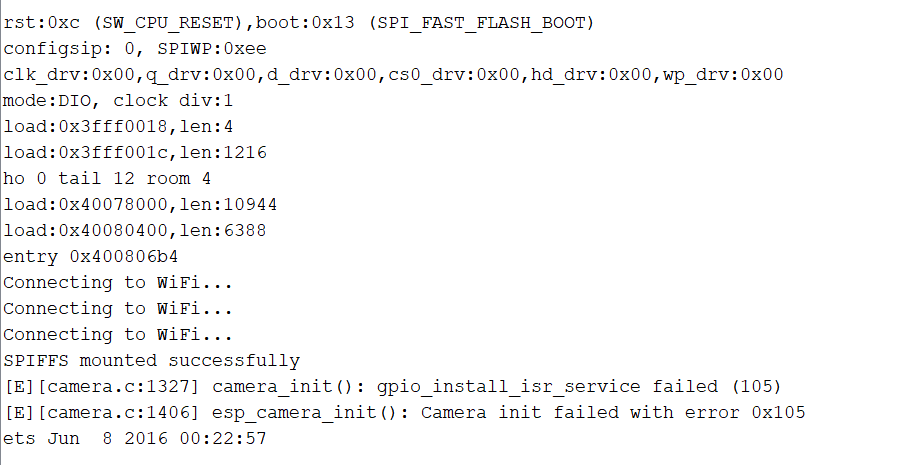
Beginner looking for help ![]()