pins of ADC unit 1 read
2516 2597 2401 2573 2448
with nothing connected to the board. Have I fried something?
pins of ADC unit 1 read
2516 2597 2401 2573 2448
with nothing connected to the board. Have I fried something?
Floating pin with high impedance = random readings. Try pulling it down with 1k or so to GND and see if it reads 0. It should.
here it is pin32 (first) shorted, then floating again.
0 0 1744 2084 1879
0 0 1767 2096 1902
0 0 1762 2083 1893
0 0 1763 2074 1884
0 0 1786 2096 1907
0 0 1818 2128 1939
0 0 1808 2112 1920
0 0 1811 2151 1941
0 0 1801 2118 1918
0 0 1806 2119 1925
2443 2443 2435 2646 2519
2495 2483 2465 2681 2547
2462 2464 2442 2710 2544
2470 2469 2438 2655 2523
2503 2510 2480 2683 2559
2514 2490 2471 2667 2545
2544 2523 2480 2673 2558
2491 2471 2423 2617 2497
2480 2479 2425 2612 2497
2527 2530 2463 2639 2548
2516 2499 2455 2635 2523
2495 2483 2450 2613 2518
doesn't look like random noise from floating pin to me...
Well it looks like a floating input to me. Random means it can be anything.
Did you try what @anon35827816 suggested?
yes. with and without resistor goes down to 0.
then when I connect it to the sensor (pressure transducer) via voltage divider (the sensor is 5v) I get values like the ones above
yesterday it showed proper values. today out of the blue started acting erratically and settled on these values.
You'll have to talk me through the table. I see 5 columns of data, with the most apparent pattern that half of the first column reads 0 and the second half doesn't. And there seems to be a correlation within each column, but across columns it's not so clear.
Should we go full-out Sherlock on this or are you going to play nice and provide data labels?
rows — samples
columns — pins 32,34,36,39
rows with zeroes — pin is grounded (with or without resistor)
Ok, so your problem might be reformulated as "I get ADC readings from my pressure transducer that I do not understand. How come?"
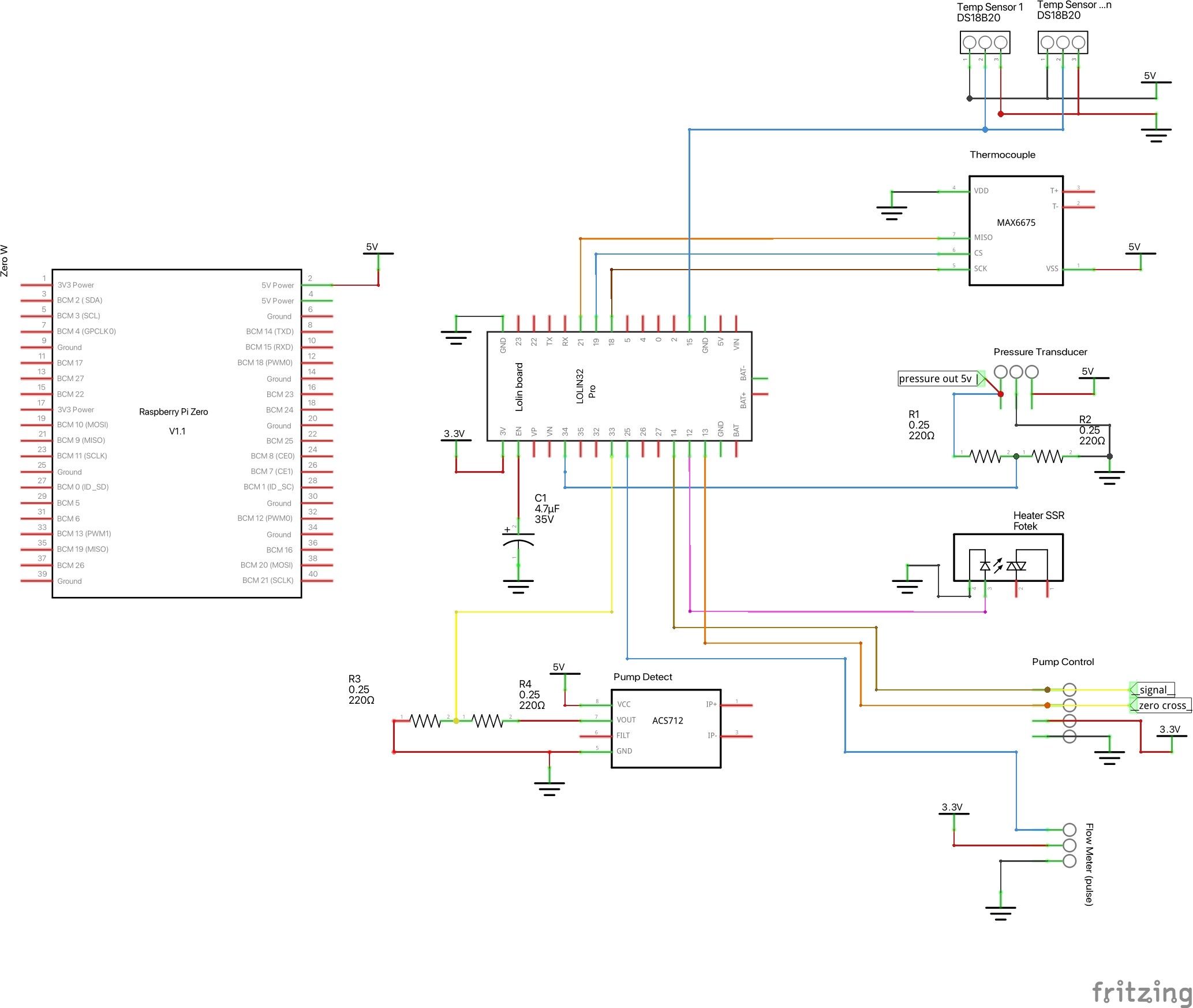
Can you post information about the transducer and a full schematic of your setup?
the pressure transducer is the typical sensor returning proportional voltage. I'll set-up test bench with voltage dividers so I know what values I get and check it properly.
That sounds easy enough to interface with.
yes and I have it working and then suddenly it goes off counting non-existent pulses with frequency same as the next pwm pin or just being erratic. when I change the board this goes away. Therefore I'm asking for advise how to check if I have damaged my board.
Sounds like a classic case of intermittent wiring. A floating analogue input will pick up signals from other working pulsing inputs.
Well troubleshooting possible code issues can be a real challenge not being able to see the code.
Troubleshooting an electronic issues is problematic enough without having the circuit to test but images and schematics help.
At this point, its all guesswork.
On the other hand a properly setup A:D converter on the ESP32 behaves quite well.
In the below junk there are several A:D ports used and properly setup.
/*
Chappie Weather upgrade/addition
process wind speed direction and rain fall.
*/
#include "esp32/ulp.h"
//#include "ulptool.h"
#include "driver/rtc_io.h"
#include <WiFi.h>
#include <PubSubClient.h>
#include "certs.h"
#include "sdkconfig.h"
#include "esp_system.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/timers.h"
#include "freertos/event_groups.h"
#include "driver/pcnt.h"
#include <driver/adc.h>
#include <SimpleKalmanFilter.h>
#include <ESP32Time.h>
////
ESP32Time rtc;
WiFiClient wifiClient;
PubSubClient MQTTclient(mqtt_server, mqtt_port, wifiClient);
////
float CalculatedVoltage = 0.0f;
float kph = 0.0f;
float rain = 0.0f;
/*
PCNT PCNT_UNIT_0, PCNT_CHANNEL_0 GPIO_NUM_15 = pulse input pin
PCNT PCNT_UNIT_1, PCNT_CHANNEL_0 GPIO_NUM_4 = pulse input pin
*/
pcnt_unit_t pcnt_unit00 = PCNT_UNIT_0; //pcnt unit 0 channel 0
pcnt_unit_t pcnt_unit10 = PCNT_UNIT_1; //pcnt unit 1 channel 0
//
//
hw_timer_t * timer = NULL;
//
#define evtAnemometer ( 1 << 0 )
#define evtRainFall ( 1 << 1 )
#define evtParseMQTT ( 1 << 2 )
EventGroupHandle_t eg;
#define OneMinuteGroup ( evtAnemometer | evtRainFall )
////
QueueHandle_t xQ_Message; // payload and topic queue of MQTT payload and topic
const int payloadSize = 100;
struct stu_message
{
char payload [payloadSize] = {'\0'};
String topic ;
} x_message;
////
SemaphoreHandle_t sema_MQTT_KeepAlive; // used to stop all other MQTT thing do's
SemaphoreHandle_t sema_mqttOK; // protect the mqttOK variable.
SemaphoreHandle_t sema_CalculatedVoltage; // protects the CalculatedVoltage variable.
////
int mqttOK = 0; // stores a count value that is used to cause an esp reset
volatile bool TimeSet = false;
////
/*
Topic topicOK has been subscribed to, the mqtt broker sends out "OK" messages if the client receives an OK message the mqttOK value is set back to zero.
If the mqttOK count reaches a set point the ESP32 will reset.
*/
////
void IRAM_ATTR mqttCallback(char* topic, byte * payload, unsigned int length)
{
memset( x_message.payload, '\0', payloadSize ); // clear payload char buffer
x_message.topic = ""; //clear topic string buffer
x_message.topic = topic; //store new topic
int i = 0; // extract payload
for ( i; i < length; i++)
{
x_message.payload[i] = (char)payload[i];
}
x_message.payload[i] = '\0';
xQueueOverwrite( xQ_Message, (void *) &x_message );// send data to queue
} // void mqttCallback(char* topic, byte* payload, unsigned int length)
////
// interrupt service routine for WiFi events put into IRAM
void IRAM_ATTR WiFiEvent(WiFiEvent_t event)
{
switch (event) {
case SYSTEM_EVENT_STA_CONNECTED:
break;
case SYSTEM_EVENT_STA_DISCONNECTED:
log_i("Disconnected from WiFi access point");
break;
case SYSTEM_EVENT_AP_STADISCONNECTED:
log_i("WiFi client disconnected");
break;
default: break;
}
} // void IRAM_ATTR WiFiEvent(WiFiEvent_t event)
////
void IRAM_ATTR onTimer()
{
BaseType_t xHigherPriorityTaskWoken;
xEventGroupSetBitsFromISR(eg, OneMinuteGroup, &xHigherPriorityTaskWoken);
} // void IRAM_ATTR onTimer()
////
void setup()
{
eg = xEventGroupCreate(); // get an event group handle
x_message.topic.reserve(100);
adc1_config_width(ADC_WIDTH_12Bit);
adc1_config_channel_atten(ADC1_CHANNEL_6, ADC_ATTEN_DB_11);// using GPIO 34 wind direction
adc1_config_channel_atten(ADC1_CHANNEL_3, ADC_ATTEN_DB_11);// using GPIO 39 current
adc1_config_channel_atten(ADC1_CHANNEL_0, ADC_ATTEN_DB_11);// using GPIO 36 battery volts
// hardware timer 4 set for one minute alarm
timer = timerBegin( 3, 80, true );
timerAttachInterrupt( timer, &onTimer, true );
timerAlarmWrite(timer, 60000000, true);
timerAlarmEnable(timer);
/* Initialize PCNT's counter */
int PCNT_H_LIM_VAL = 3000;
int PCNT_L_LIM_VAL = -10;
// 1st PCNT counter
pcnt_config_t pcnt_config = {};
pcnt_config.pulse_gpio_num = GPIO_NUM_15;// Set PCNT input signal and control GPIOs
pcnt_config.ctrl_gpio_num = PCNT_PIN_NOT_USED;
pcnt_config.channel = PCNT_CHANNEL_0;
pcnt_config.unit = PCNT_UNIT_0;
// What to do on the positive / negative edge of pulse input?
pcnt_config.pos_mode = PCNT_COUNT_INC; // Count up on the positive edge
pcnt_config.neg_mode = PCNT_COUNT_DIS; // Count down disable
// What to do when control input is low or high?
pcnt_config.lctrl_mode = PCNT_MODE_KEEP; // Keep the primary counter mode if low
pcnt_config.hctrl_mode = PCNT_MODE_KEEP; // Keep the primary counter mode if high
// Set the maximum and minimum limit values to watch
pcnt_config.counter_h_lim = PCNT_H_LIM_VAL;
pcnt_config.counter_l_lim = PCNT_L_LIM_VAL;
pcnt_unit_config(&pcnt_config); // Initialize PCNT unit
pcnt_set_filter_value( PCNT_UNIT_0, 1); //Configure and enable the input filter
pcnt_filter_enable( PCNT_UNIT_0 );
pcnt_counter_pause( PCNT_UNIT_0 );
pcnt_counter_clear( PCNT_UNIT_0 );
pcnt_counter_resume( PCNT_UNIT_0); // start the show
// setup 2nd PCNT
pcnt_config = {};
pcnt_config.pulse_gpio_num = GPIO_NUM_4;
pcnt_config.ctrl_gpio_num = PCNT_PIN_NOT_USED;
pcnt_config.channel = PCNT_CHANNEL_0;
pcnt_config.unit = PCNT_UNIT_1;
pcnt_config.pos_mode = PCNT_COUNT_INC;
pcnt_config.neg_mode = PCNT_COUNT_DIS;
pcnt_config.lctrl_mode = PCNT_MODE_KEEP;
pcnt_config.hctrl_mode = PCNT_MODE_KEEP;
pcnt_config.counter_h_lim = PCNT_H_LIM_VAL;
pcnt_config.counter_l_lim = PCNT_L_LIM_VAL;
pcnt_unit_config(&pcnt_config);
//pcnt_set_filter_value( PCNT_UNIT_1, 1 );
//pcnt_filter_enable ( PCNT_UNIT_1 );
pcnt_counter_pause ( PCNT_UNIT_1 );
pcnt_counter_clear ( PCNT_UNIT_1 );
pcnt_counter_resume ( PCNT_UNIT_1 );
//
xQ_Message = xQueueCreate( 1, sizeof(stu_message) );
//
sema_CalculatedVoltage = xSemaphoreCreateBinary();
xSemaphoreGive( sema_CalculatedVoltage );
sema_mqttOK = xSemaphoreCreateBinary();
xSemaphoreGive( sema_mqttOK );
sema_MQTT_KeepAlive = xSemaphoreCreateBinary();
///
xTaskCreatePinnedToCore( MQTTkeepalive, "MQTTkeepalive", 15000, NULL, 5, NULL, 1 );
xTaskCreatePinnedToCore( fparseMQTT, "fparseMQTT", 10000, NULL, 5, NULL, 1 ); // assign all to core 1, WiFi in use.
xTaskCreatePinnedToCore( fReadBattery, "fReadBattery", 4000, NULL, 3, NULL, 1 );
xTaskCreatePinnedToCore( fReadCurrent, "fReadCurrent", 4000, NULL, 3, NULL, 1 );
xTaskCreatePinnedToCore( fWindDirection, "fWindDirection", 10000, NULL, 4, NULL, 1 );
xTaskCreatePinnedToCore( fAnemometer, "fAnemometer", 10000, NULL, 4, NULL, 1 );
xTaskCreatePinnedToCore( fRainFall, "fRainFall", 10000, NULL, 4, NULL, 1 );
xTaskCreatePinnedToCore( fmqttWatchDog, "fmqttWatchDog", 3000, NULL, 3, NULL, 1 ); // assign all to core 1
} //void setup()
static void init_ulp_program()
{
//not sharing this code
}
////
void fWindDirection( void *pvParameters )
// read the wind direction sensor, return heading in degrees
{
float adcValue = 0.0f;
uint64_t TimePastKalman = esp_timer_get_time();
SimpleKalmanFilter KF_ADC( 1.0f, 1.0f, .01f );
float high = 0.0f;
float low = 2000.0f;
float ADscale = 3.3f / 4096.0f;
TickType_t xLastWakeTime = xTaskGetTickCount();
const TickType_t xFrequency = 100; //delay for mS
int count = 0;
String windDirection;
windDirection.reserve(20);
String MQTTinfo = "";
MQTTinfo.reserve( 150 );
while ( !MQTTclient.connected() )
{
vTaskDelay( 250 );
}
for (;;)
{
windDirection = "";
adcValue = float( adc1_get_raw(ADC1_CHANNEL_6) ); //take a raw ADC reading
KF_ADC.setProcessNoise( (esp_timer_get_time() - TimePastKalman) / 1000000.0f ); //get time, in microsecods, since last readings
adcValue = KF_ADC.updateEstimate( adcValue ); // apply simple Kalman filter
TimePastKalman = esp_timer_get_time(); // time of update complete
adcValue = adcValue * ADscale;
if ( (adcValue >= 0.0f) & (adcValue <= .25f ) )
{
// log_i( " n" );
windDirection.concat( "N" );
}
if ( (adcValue > .25f) & (adcValue <= .6f ) )
{
// log_i( " e" );
windDirection.concat( "E" );
}
if ( (adcValue > 2.0f) & ( adcValue < 3.3f) )
{
// log_i( " s" );
windDirection.concat( "S");
}
if ( (adcValue >= 1.7f) & (adcValue < 2.0f ) )
{
// log_i( " w" );
windDirection.concat( "W" );
}
if ( count >= 30 )
{
MQTTinfo.concat( String(kph, 2) );
MQTTinfo.concat( ",");
MQTTinfo.concat( windDirection );
MQTTinfo.concat( ",");
MQTTinfo.concat( String(rain, 2) );
xSemaphoreTake( sema_MQTT_KeepAlive, portMAX_DELAY );
MQTTclient.publish( topicWSWDRF, MQTTinfo.c_str() );
xSemaphoreGive( sema_MQTT_KeepAlive );
count = 0;
}
count++;
MQTTinfo = "";
xLastWakeTime = xTaskGetTickCount();
vTaskDelayUntil( &xLastWakeTime, xFrequency );
}
vTaskDelete ( NULL );
}
// read rainfall
void fRainFall( void *pvParemeters )
{
int16_t click = 0; //count tipping bucket clicks
pcnt_counter_pause( PCNT_UNIT_1 );
pcnt_counter_clear( PCNT_UNIT_1 );
pcnt_counter_resume( PCNT_UNIT_1 );
for (;;)
{
xEventGroupWaitBits (eg, evtRainFall, pdTRUE, pdTRUE, portMAX_DELAY);
if ( (rtc.getHour(true) == 23) && (rtc.getMinute() == 59) )
{
pcnt_counter_pause( PCNT_UNIT_1 );
rain = 0.0f;
pcnt_counter_clear( PCNT_UNIT_1 );
pcnt_counter_resume( PCNT_UNIT_1 );
} else {
pcnt_counter_pause( PCNT_UNIT_1 );
pcnt_get_counter_value( PCNT_UNIT_1, &click );
if ( click != 0 )
{
rain = rain + (0.2794f * (float)click);// 0.2794mm of rain per click
pcnt_counter_clear( PCNT_UNIT_1 );
//log_i( "count %d, rain rain = %f mm", click, rain );
}
pcnt_counter_resume( PCNT_UNIT_1 );
click = 0;
}
}
vTaskDelete ( NULL );
}
////
void fAnemometer( void *pvParameters )
{
int16_t count = 0;
pcnt_counter_clear(PCNT_UNIT_0);
pcnt_counter_resume(PCNT_UNIT_0);
for (;;)
{
xEventGroupWaitBits (eg, evtAnemometer, pdTRUE, pdTRUE, portMAX_DELAY);
pcnt_counter_pause( PCNT_UNIT_0 );
pcnt_get_counter_value( PCNT_UNIT_0, &count);
kph = 2.4f * ((float)count / 60.0f);// A wind speed of 2.4km/h causes the switch to close once per second
pcnt_counter_clear( PCNT_UNIT_0 );
pcnt_counter_resume( PCNT_UNIT_0 );
}
vTaskDelete ( NULL );
}
//////
void fmqttWatchDog( void * paramater )
{
int UpdateImeTrigger = 86400; //seconds in a day
int UpdateTimeInterval = 86300; // 1st time update in 100 counts
int maxNonMQTTresponse = 60;
for (;;)
{
vTaskDelay( 1000 );
if ( mqttOK >= maxNonMQTTresponse )
{
ESP.restart();
}
xSemaphoreTake( sema_mqttOK, portMAX_DELAY );
mqttOK++;
xSemaphoreGive( sema_mqttOK );
UpdateTimeInterval++; // trigger new time get
if ( UpdateTimeInterval >= UpdateImeTrigger )
{
TimeSet = false; // sets doneTime to false to get an updated time after a days count of seconds
UpdateTimeInterval = 0;
}
}
vTaskDelete( NULL );
}
//////
void fparseMQTT( void *pvParameters )
{
struct stu_message px_message;
for (;;)
{
if ( xQueueReceive(xQ_Message, &px_message, portMAX_DELAY) == pdTRUE )
{
// parse the time from the OK message and update MCU time
if ( String(px_message.topic) == topicOK )
{
if ( !TimeSet)
{
String temp = "";
temp = px_message.payload[0];
temp += px_message.payload[1];
temp += px_message.payload[2];
temp += px_message.payload[3];
int year = temp.toInt();
temp = "";
temp = px_message.payload[5];
temp += px_message.payload[6];
int month = temp.toInt();
temp = "";
temp = px_message.payload[8];
temp += px_message.payload[9];
int day = temp.toInt();
temp = "";
temp = px_message.payload[11];
temp += px_message.payload[12];
int hour = temp.toInt();
temp = "";
temp = px_message.payload[14];
temp += px_message.payload[15];
int min = temp.toInt();
rtc.setTime( 0, min, hour, day, month, year );
log_i( "rtc %s ", rtc.getTime() );
TimeSet = true;
}
}
//
} //if ( xQueueReceive(xQ_Message, &px_message, portMAX_DELAY) == pdTRUE )
xSemaphoreTake( sema_mqttOK, portMAX_DELAY );
mqttOK = 0;
xSemaphoreGive( sema_mqttOK );
}
} // void fparseMQTT( void *pvParameters )#include <ESP32Time.h>
//////
void fReadCurrent( void * parameter )
{
const TickType_t xFrequency = 1000; //delay for mS
const float mVperAmp = 185.0f;
float ADbits = 4096.0f;
float ref_voltage = 3.3f;
float mA = 0.0f;
float adcValue = 0.0f;
float Voltage = 0.0f;
float Power = 0.0f;
float offSET = 0.0f;
int printCount = 0;
uint64_t TimePastKalman = esp_timer_get_time(); // used by the Kalman filter UpdateProcessNoise, time since last kalman calculation
SimpleKalmanFilter KF_I( 1.0f, 1.0f, .01f );
/*
185mv/A = 5 AMP MODULE
100mv/A = 20 amp module
66mv/A = 30 amp module
*/
String powerInfo = "";
powerInfo.reserve( 150 );
while ( !MQTTclient.connected() )
{
vTaskDelay( 250 );
}
TickType_t xLastWakeTime = xTaskGetTickCount();
for (;;)
{
adc1_get_raw(ADC1_CHANNEL_3); // read once discard reading
adcValue = ( (float)adc1_get_raw(ADC1_CHANNEL_3) );
//log_i( "adcValue I = %f", adcValue );
Voltage = ( (adcValue * ref_voltage) / ADbits ) + offSET; // Gets you mV
mA = Voltage / mVperAmp; // get amps
KF_I.setProcessNoise( (esp_timer_get_time() - TimePastKalman) / 1000000.0f ); //get time, in microsecods, since last readings
mA = KF_I.updateEstimate( mA ); // apply simple Kalman filter
TimePastKalman = esp_timer_get_time(); // time of update complete
printCount++;
if ( printCount == 60 )
{
xSemaphoreTake( sema_CalculatedVoltage, portMAX_DELAY);
Power = CalculatedVoltage * mA;
//log_i( "Voltage=%f mA=%f Power=%f", CalculatedVoltage, mA, Power );
printCount = 0;
powerInfo.concat( String(CalculatedVoltage, 2) );
xSemaphoreGive( sema_CalculatedVoltage );
powerInfo.concat( ",");
powerInfo.concat( String(mA, 4) );
powerInfo.concat( ",");
powerInfo.concat( String(Power, 4) );
xSemaphoreTake( sema_MQTT_KeepAlive, portMAX_DELAY );
MQTTclient.publish( topicPower, powerInfo.c_str() );
xSemaphoreGive( sema_MQTT_KeepAlive );
powerInfo = "";
}
xLastWakeTime = xTaskGetTickCount();
vTaskDelayUntil( &xLastWakeTime, xFrequency );
}
vTaskDelete( NULL );
} //void fReadCurrent( void * parameter )
////
void fReadBattery( void * parameter )
{
float adcValue = 0.0f;
const float r1 = 50500.0f; // R1 in ohm, 50K
const float r2 = 10000.0f; // R2 in ohm, 10k potentiometer
float Vbatt = 0.0f;
int printCount = 0;
float vRefScale = (3.3f / 4096.0f) * ((r1 + r2) / r2);
uint64_t TimePastKalman = esp_timer_get_time(); // used by the Kalman filter UpdateProcessNoise, time since last kalman calculation
SimpleKalmanFilter KF_ADC_b( 1.0f, 1.0f, .01f );
TickType_t xLastWakeTime = xTaskGetTickCount();
const TickType_t xFrequency = 1000; //delay for mS
for (;;)
{
adc1_get_raw(ADC1_CHANNEL_0); //read and discard
adcValue = float( adc1_get_raw(ADC1_CHANNEL_0) ); //take a raw ADC reading
KF_ADC_b.setProcessNoise( (esp_timer_get_time() - TimePastKalman) / 1000000.0f ); //get time, in microsecods, since last readings
adcValue = KF_ADC_b.updateEstimate( adcValue ); // apply simple Kalman filter
Vbatt = adcValue * vRefScale;
xSemaphoreTake( sema_CalculatedVoltage, portMAX_DELAY );
CalculatedVoltage = Vbatt;
xSemaphoreGive( sema_CalculatedVoltage );
printCount++;
if ( printCount == 3 )
{
log_i( "Vbatt %f", Vbatt );
printCount = 0;
}
TimePastKalman = esp_timer_get_time(); // time of update complete
xLastWakeTime = xTaskGetTickCount();
vTaskDelayUntil( &xLastWakeTime, xFrequency );
//log_i( "fReadBattery %d", uxTaskGetStackHighWaterMark( NULL ) );
}
vTaskDelete( NULL );
}
////
void MQTTkeepalive( void *pvParameters )
{
sema_MQTT_KeepAlive = xSemaphoreCreateBinary();
xSemaphoreGive( sema_MQTT_KeepAlive ); // found keep alive can mess with a publish, stop keep alive during publish
// setting must be set before a mqtt connection is made
MQTTclient.setKeepAlive( 90 ); // setting keep alive to 90 seconds makes for a very reliable connection, must be set before the 1st connection is made.
for (;;)
{
//check for a is-connected and if the WiFi 'thinks' its connected, found checking on both is more realible than just a single check
if ( (wifiClient.connected()) && (WiFi.status() == WL_CONNECTED) )
{
xSemaphoreTake( sema_MQTT_KeepAlive, portMAX_DELAY ); // whiles MQTTlient.loop() is running no other mqtt operations should be in process
MQTTclient.loop();
xSemaphoreGive( sema_MQTT_KeepAlive );
}
else {
log_i( "MQTT keep alive found MQTT status %s WiFi status %s", String(wifiClient.connected()), String(WiFi.status()) );
if ( !(wifiClient.connected()) || !(WiFi.status() == WL_CONNECTED) )
{
connectToWiFi();
}
connectToMQTT();
}
vTaskDelay( 250 ); //task runs approx every 250 mS
}
vTaskDelete ( NULL );
}
////
void connectToWiFi()
{
int TryCount = 0;
while ( WiFi.status() != WL_CONNECTED )
{
TryCount++;
WiFi.disconnect();
WiFi.begin( SSID, PASSWORD );
vTaskDelay( 4000 );
if ( TryCount == 10 )
{
ESP.restart();
}
}
WiFi.onEvent( WiFiEvent );
} // void connectToWiFi()
////
void connectToMQTT()
{
MQTTclient.setKeepAlive( 90 ); // needs be made before connecting
byte mac[5];
WiFi.macAddress(mac);
String clientID = String(mac[0]) + String(mac[4]) ; // use mac address to create clientID
while ( !MQTTclient.connected() )
{
// boolean connect(const char* id, const char* user, const char* pass, const char* willTopic, uint8_t willQos, boolean willRetain, const char* willMessage);
MQTTclient.connect( clientID.c_str(), mqtt_username, mqtt_password, NULL , 1, true, NULL );
vTaskDelay( 250 );
}
MQTTclient.setCallback( mqttCallback );
MQTTclient.subscribe( topicOK );
} // void connectToMQTT()
////
void loop() {}
Have a look and perhaps the OP could get some clues or not about using their A:D converters on an ESP32.
Here is a link the the ESp32 A:D API, Analog to Digital Converter (ADC) - ESP32 - — ESP-IDF Programming Guide latest documentation (espressif.com).
Similarly, if a hardware issue underlies this issue, a schematic would be useful.
thank you for the code! I'm reading the esp-idf manual, looking at their examples and use pwm with zero cross sync, but I can always use one more working example to compare notes.
I am asking for guidance to debug my situation. I'm confident I've fried two boards already (they're definitely gone) for running low-voltage wires close to my solenoid valve. I know I've had grounding problems too because my thermocouple readings were wonky. I've fixed these and now I have board(s) that I've used, have been stable and intermittently misbehave.
The ESP32 is a 3.3V device, putting more than 3.3V on the GPIO pins fracks the ESP32.
Consider. Voltage Divider Calculator (ohmslawcalculator.com) R2 should be 10K. Input volts is 5.
thanks, I've used divider calculator. these are actually not the real values. However big thanks for pointing this out because I went to measure the real values (I forgot what I put) and realised there's a problem and the voltage goes above 3.9v. I've made some mistake when soldering...
I think you should read this: Page not Found - ESP32 - — ESP-IDF Programming Guide latest documentation
It seems you assume can read up to 3.3V with the ESP ADC but AFAIK you can't.
Thanks. I did and I understand by default biggest attenuation is configured, therefore max of 2.45v should be OK?
By design pressure was always under the max range of the sensor so I never expected to hit 3v anyway. But as I realised I've wired my voltage divider wrongly. The data I got made sense (until I didn't) so I never double checked with the multimeter. Rookie mistake.