I own a arduino robot (on the instruction manual it is called "Arduino UNO TH Robot WiFi video smart robot") but it is very poorly documented and the linked internet page is written in an asian language. I am trying to run the two motors i have attached to the motor shield but i cannot get them working. Probably because i got the wrong pins. I am very new to arduino programming, does somebody have an idea how i could find out the pins i have to address to run the motors?
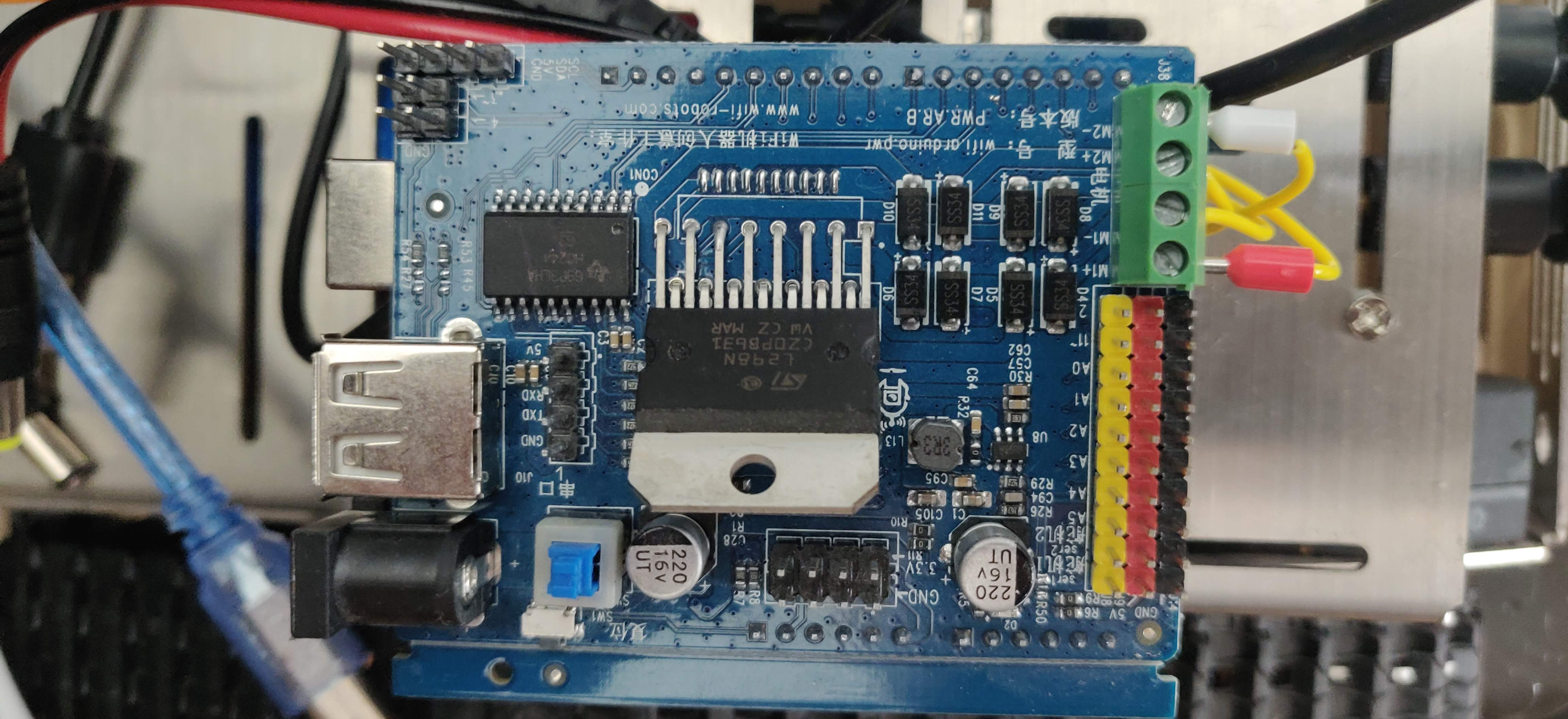
Attached is the asian schematic of the motor shield and an image of the motor shield with the motor cables connected. I already tried following the instructions on https://www.instructables.com/id/Arduino-Motor-Shield-Tutorial/.
Thanks
PWR.AR.C Power and Driver Schematic.pdf (79.7 KB)
First thing I notice is that you have connections to M1+ and M2+. But M1- and M1+ forms a pair (A) and M2- and M2+ form a pair (B). Also, the Arduino does NOT supply power for the motor if it's connected to USB. Use the barrel jack on the shield (which is connected to Vin of the Arduino as well).
As far as I can see the pins (for the motor driver) are:
IN1 = 8
IN2 = 7
IN3 = 12
IN4 = 13
ENA = 5
ENB = 6
Thanks for your answer, I have connected all 4 cables but only 2 are crimped. And i checked that the 2 cables from the left motor are connected to M1+ and M1- and the cables from the right motor are connected to M2- and M2+.
The robot has a battery underneath with 2 outputs, in the instructions it says i should connect one output to the motor shield and one to the, currently not attached servo shield. Is this what you mean?
I am not completly sure what the pins you gave me mean. I thought i need for each motor a direction, speed and a brake pin?
raspbounty:
Thanks for your answer, I have connected all 4 cables but only 2 are crimped. And i checked that the 2 cables from the left motor are connected to M1+ and M1- and the cables from the right motor are connected to M2- and M2+.
Ahh, okay. Didn't notice on the photo.
raspbounty:
The robot has a battery underneath with 2 outputs, in the instructions it says i should connect one output to the motor shield and one to the, currently not attached servo shield. Is this what you mean?
If that would connect power to the barrel jack, yes.
raspbounty:
I am not completly sure what the pins you gave me mean. I thought i need for each motor a direction, speed and a brake pin?
Ahh, I see the confusion now. I only scanned the page you linked. But it definitely uses a different driver IC. You have a driver with a L298N onboard. It doesn't have a direction, speed and brake configuration but an IN1, IN2 and ENable pin. Use the Enable pin for PWM. IN1 (or 3) HIGH, IN2 (or 4) LOW => one direction. IN1 (or 3) LOW, IN2 (or 4) HIGH=> other direction.
Awesome that works, thanks for your help.