Hello team, I need your support to communicate my ARDUINO and Sensor TLE493D-W2B6
The problem here is that I have connect my arduino uno with my sensor and the only response I got is like in the image below:
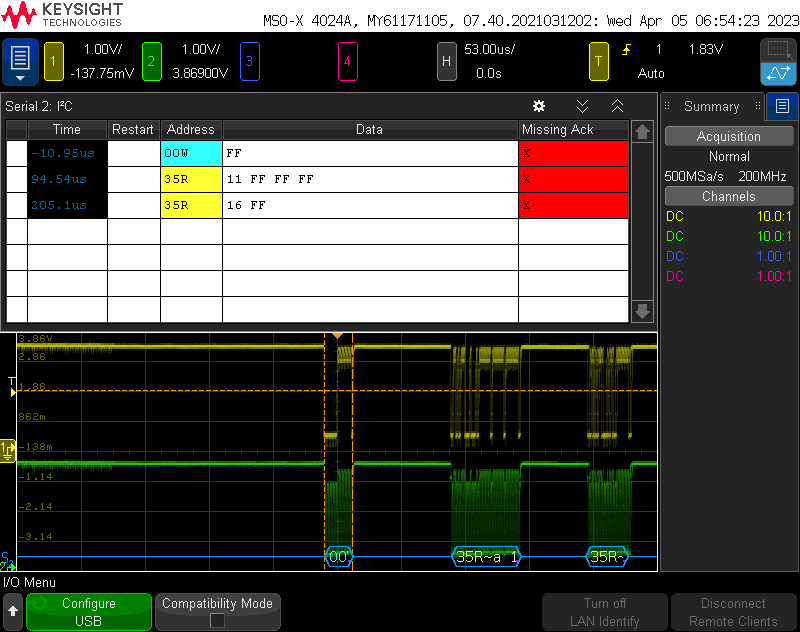
and sometimes I catch one special data as shown below:
but I'm not sure how that data is created

and the Code I'm using is below:
#include <Wire.h>
#include <Tle493d.h>
#include <Tle493d_w2b6.h>
#define TLE493D_A0 0x35 // I2C address
#define MOD1_reg 0x11
byte YOUR_CHIP_ADDRESS = TLE493D_A0;
const int RP2= 2;
const int RP3= 3;
const int RP4= 4;
const int RP5= 5;
const int RP6= 6;
int P2= 0;
int P3= 0;
int P4= 0;
int P5= 0;
int P6= 0;
int Rep0;
int Rep1;
int Rep2;
int Rep3;
void setup() {
Wire.begin(0x35);
Wire.onRequest(eventoSolicitud);
Wire.onReceive(eventoRecepcion);
pinMode(RP2, INPUT);
pinMode(RP3, INPUT);
pinMode(RP4, INPUT);
pinMode(RP5, INPUT);
pinMode(RP6, INPUT);
}
void loop() {
P2=digitalRead(RP2);
P3=digitalRead(RP3);
P4=digitalRead(RP4);
P5=digitalRead(RP5);
P6=digitalRead(RP6);
delay(500);
}
void eventoRecepcion(){
Rep0= Wire.read();
Rep1= Wire.read();
Rep2= Wire.read();
Rep3= Wire.read();
}
void eventoSolicitud() {
if(P6==0 && P2==0 && P3==0 && P4==0 && P5==0){
//Sequence to Neutral Position
Wire.write(0x80);
Wire.write(0x0A);
Wire.write(0x00);
Wire.write(0x01);
Wire.write(0x48);
Wire.write(0x80);
Wire.write(0x0C);
Wire.write(0x40);
}
else if(P6==0 && P2==0 && P3==0 && P4==1 && P5==0){
//Sequence to Left change lane Position
Wire.write(0x80);
Wire.write(0xEF);
Wire.write(0x00);
Wire.write(0x01);
Wire.write(0x48);
Wire.write(0x51);
Wire.write(0x8D);
Wire.write(0x4F);
}
else if(P6==0 && P2==1 && P3==1 && P4==0 && P5==0){
//Sequence to Left Change Lane + Flash to Pass Position
Wire.write(0x80);
Wire.write(0xF1);
Wire.write(0xFC);
Wire.write(0xFA);
Wire.write(0x48);
Wire.write(0x51);
Wire.write(0x8D);
Wire.write(0x4F);
}
else if(P6==0 && P2==1 && P3==1 && P4==0 && P5==1){
//Sequence to Left Turn + Flash to Pass Position
Wire.write(0x80);
Wire.write(0xF4);
Wire.write(0xF8);
Wire.write(0xFB);
Wire.write(0x48);
Wire.write(0x51);
Wire.write(0x8D);
Wire.write(0x4F);
}
else if(P6==0 && P2==1 && P3==1 && P4==1 && P5==0){
//Sequence to Right Change Lane + Flash to Pass Position
Wire.write(0x80);
Wire.write(0xF1);
Wire.write(0x04);
Wire.write(0xFB);
Wire.write(0x48);
Wire.write(0x51);
Wire.write(0x8D);
Wire.write(0x4F);
}
else if(P6==0 && P2==1 && P3==1 && P4==1 && P5==1){
//Sequence to Right Turn + Flash to Pass Position
Wire.write(0x80);
Wire.write(0xFC);
Wire.write(0x06);
Wire.write(0xFE);
Wire.write(0x48);
Wire.write(0x51);
Wire.write(0x8D);
Wire.write(0x4F);
}
else if(P6==1 && P2==0 && P3==0 && P4==0 && P5==0){
// Telescope (TT)
// Neutral
Wire.write(0x80);
Wire.write(0x0B);
Wire.write(0xFC);
Wire.write(0x01);
Wire.write(0x4A);
Wire.write(0x51);
Wire.write(0x8D);
Wire.write(0x4F);
Serial.print("NEUTRAL");
}
}
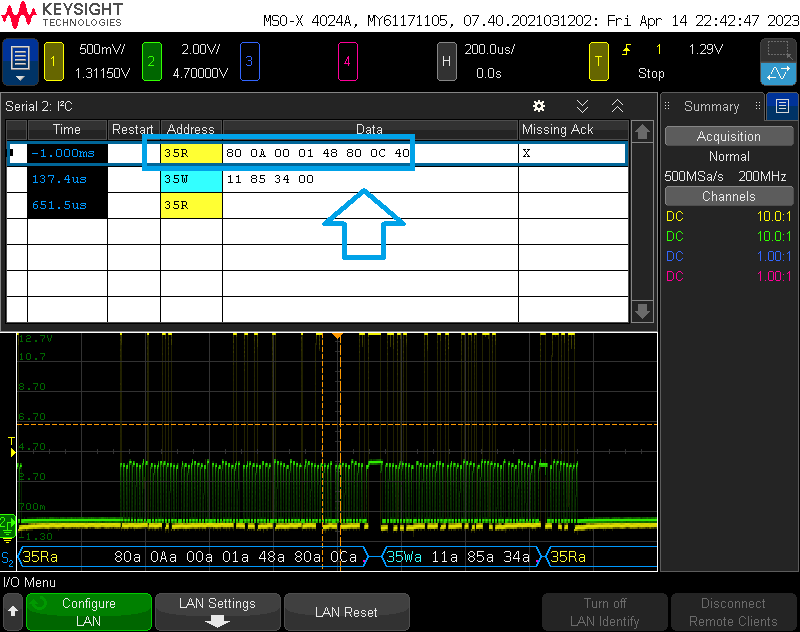
When I used this programm with two arduinos it was posible to have the connection, but I don't know what step do I need to do to have a response with the sensor like in image below:
Thank you so much team ![]()