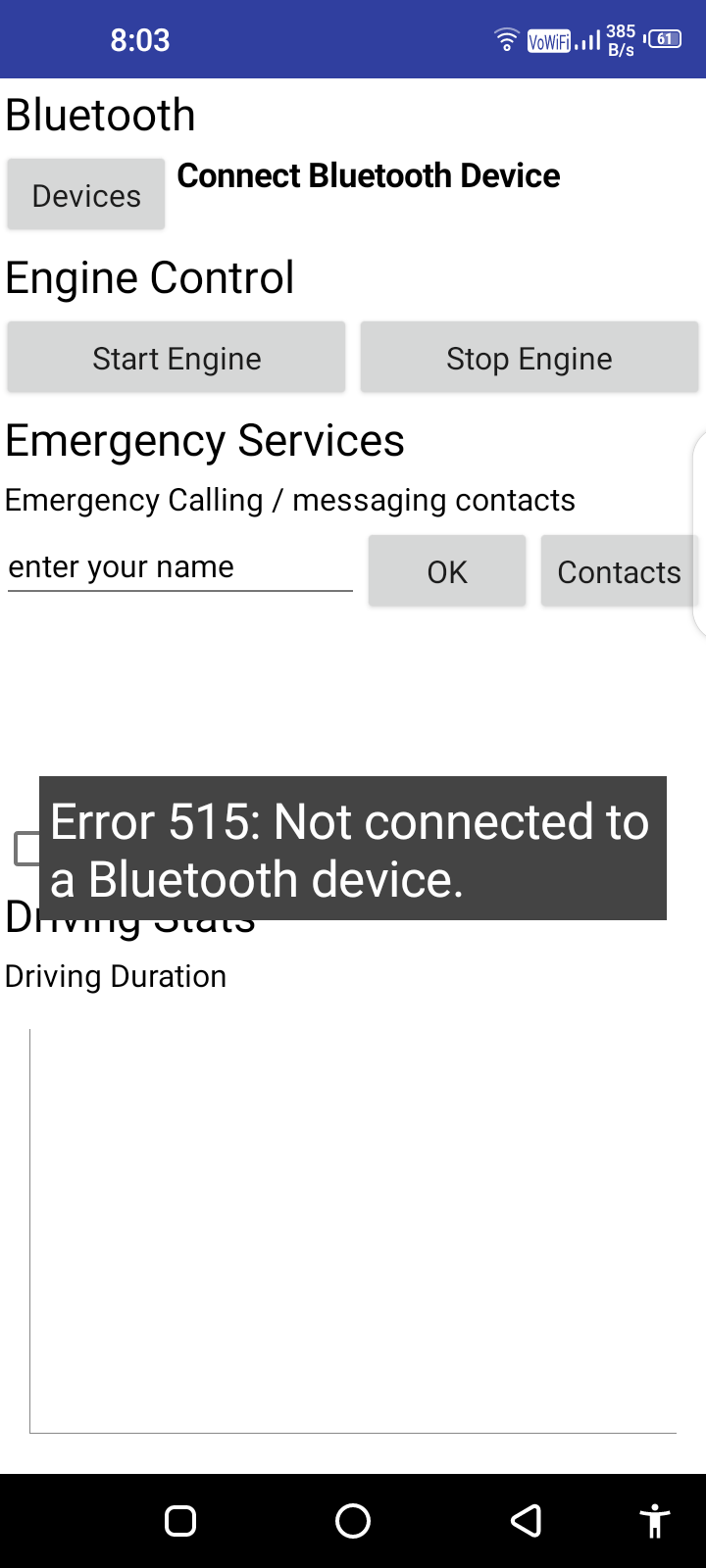
Hello to the community! I'm new here so I apologise I'm posting this in the wrong category. I'm having problems in communication between my arduino Uno and app. the app and arduino are not responding when commands are sent. I do not have much knowledge in either arduino or app development so I apologise if it is a simple issue. I have embedded both the arduino and App inventor code here. Thanks in advance!

#include <SoftwareSerial.h>
#define IR_RIGHT 12
#define IR_LEFT 11
#define BL_RX 9
#define BL_TX 10
#define ALCOHOL 8
#define LED 7
#define LEFT_BLINKER 6
#define RIGHT_BLINKER 5
#define LDR 4
#define BUZZER 3
bool engine = false;
bool ir_right;
bool ir_left;
int mag;
int joyx;
int joyy;
int press;
int crashcount;
bool alc_s;
int acc_x;
int acc_y;
int acc_z;
char blvalue;
volatile int BT;
int st;
int time;
SoftwareSerial mySerialBT(BL_TX,BL_RX);
void BL_READ() {
if (mySerialBT.available() > 0) {
BT = mySerialBT.read();
Serial.println(BT);
if (73 == BT) {
engine = true;
mySerialBT.print("G");
mySerialBT.println();
} else if (82 == BT) {
mySerialBT.print(blvalue);
mySerialBT.println();
mySerialBT.print("G");
mySerialBT.println();
} else if (74 == BT) {
engine = false;
mySerialBT.print("G");
mySerialBT.println();
} else {
mySerialBT.print("R");
mySerialBT.println();
}
}
}
void blink_right() {
analogWrite(RIGHT_BLINKER, 255);
delay(500);
analogWrite(RIGHT_BLINKER, 0);
delay(500);
}
void check() {
value_checks();
if ((ir_left | ir_right) == true) {
alarm();
} else {
analogWrite(5, 0);
}
if (acc_x < 390) {
blink_left();
}
if (acc_x > 470) {
blink_right();
}
if ((acc_x > 600 | acc_y > 600) | acc_z > 600) {
alarm();
delay(1000);
crashcount = crashcount + 1;
if (crashcount > 10) {
mySerialBT.print("C");
mySerialBT.println();
blvalue = "C";
}
}
if (alc_s == false) {
alarm();
}
}
void value_checks() {
press = analogRead(A5);
joyx = analogRead(A2);
joyx = analogRead(A3);
acc_x = analogRead(A0);
acc_y = analogRead(A1);
acc_z = analogRead(A4);
ir_left = digitalRead(IR_LEFT);
ir_right = digitalRead(IR_RIGHT);
alc_s = digitalRead(ALCOHOL);
}
void alarm() {
analogWrite(3, 255);
delay(500);
analogWrite(3, 0);
delay(500);
pinMode(LED, OUTPUT);
digitalWrite(LED, 1);
delay(500);
pinMode(LED, OUTPUT);
digitalWrite(LED, 0);
delay(500);
}
void blink_left() {
analogWrite(LEFT_BLINKER, 255);
delay(500);
analogWrite(LEFT_BLINKER, 0);
delay(500);
}
void joystick_checks() {
if (press < 7) {
mySerialBT.print("P");
mySerialBT.println();
blvalue = "P";
}
if (joyx < 30) {
mySerialBT.print("A");
mySerialBT.println();
blvalue = "A";
}
if (joyx > 800) {
mySerialBT.print("D");
mySerialBT.println();
blvalue = "D";
}
if (joyy < 30) {
mySerialBT.print("W");
mySerialBT.println();
blvalue = "W";
}
if (joyy > 800) {
mySerialBT.print("S");
mySerialBT.println();
blvalue = "S";
}
}
void setup() {
pinMode(RIGHT_BLINKER, OUTPUT);
pinMode(LED, OUTPUT);
pinMode(BUZZER, OUTPUT);
pinMode(LEFT_BLINKER, OUTPUT);
pinMode(IR_LEFT, INPUT_PULLUP);
pinMode(IR_RIGHT, INPUT_PULLUP);
pinMode(ALCOHOL, INPUT_PULLUP);
Serial.begin(9600);
mySerialBT.begin(9600);
}
void loop() {
BL_READ();
if (engine == true) {
check();
joystick_checks();
}
}