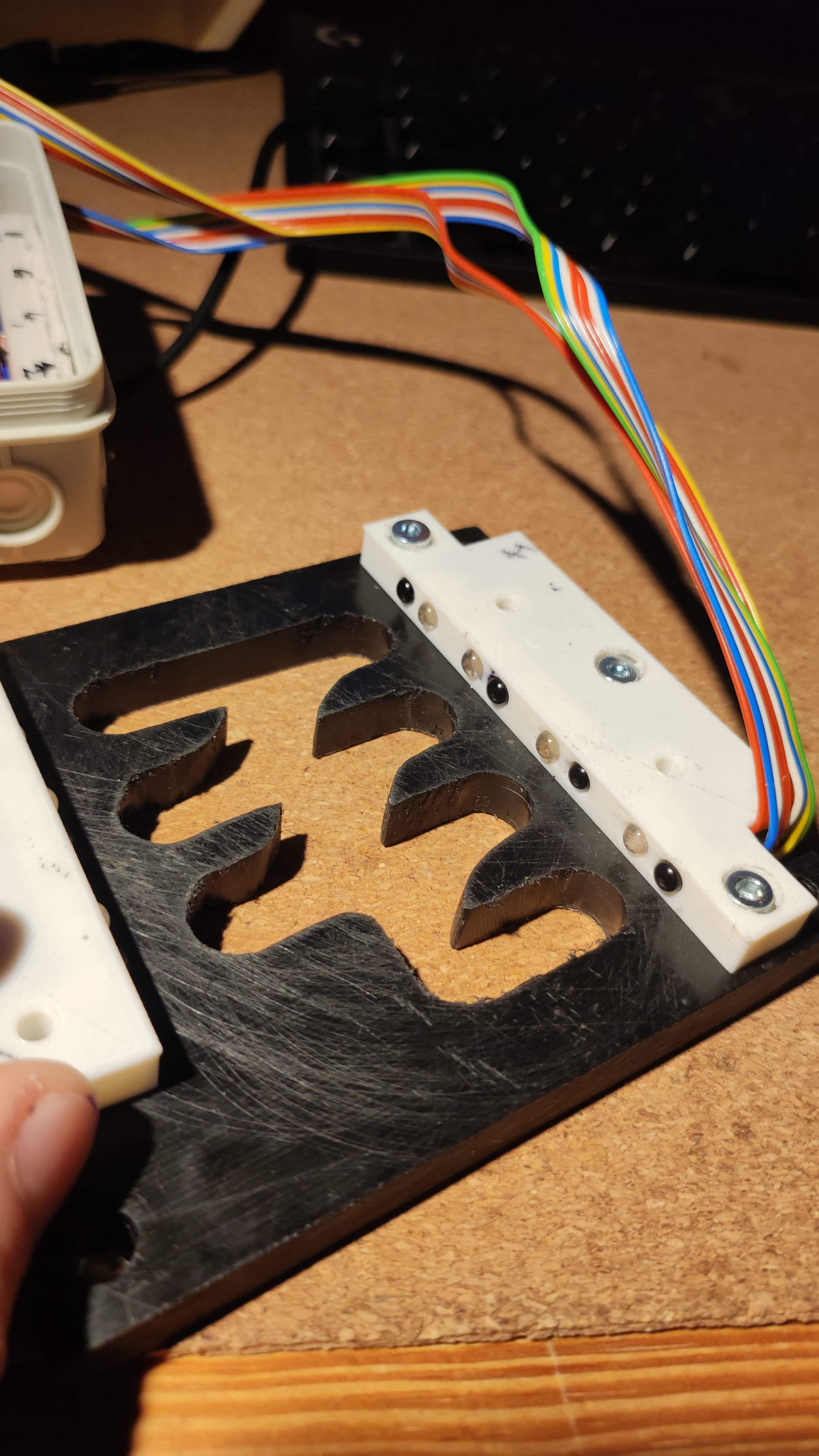
Hi, can please someone help, I´m building H-pattern shifter and I´m using code downloaded from internet which works well, I was using it with mechanical switches, but I´m trying to upgrade it to contactless system using IR sensors, I´m using seven FC-51 sensor boards, I installed row of diodes on one side of the shifter (Gear 2,4,6,R) And it works flawlessly, configured to turn on in distance around 1 cm just like I want it , no issues at all until I added oposite side of shifter diodes (Gear 1,3,5) which are now facing directly to first row, distance is around 5cm from each other, and now all my diodes are turned on all the time, I tried to switch diodes , so reciver is not facing to transmitter, but I discovered no difference, I tried to move it more far away form the first row, or lower it below , but even 4 cm below first row it´s still interfering... radius where it interfere is pretty big (20cm from each in the same level still turned on), I´m pretty new to coding , It´s some way how to make it work with some code changes, or it´s impossible that two IR sensors can work without interfering when facing to each other ?
thanks for any advice or solution
I´m using Arduino Pro micro
#include <Joystick.h>
Joystick_ Joystick;
int gear1 = 3; // first gear set to pin 3
int gear2 = 4; // second gear set to pin 4
int gear3 = 5; // third gear set to pin 5
int gear4 = 6; // fourth gear set to pin 6
int gear5 = 7; // fifth gear set to pin 7
int gear6 = 8; // eight gear set to pin 8
int gearR = 9; // nineth gear set to pin 9
void setup() {
pinMode(gear1, OUTPUT);
digitalWrite(gear1, HIGH);
pinMode(gear2, OUTPUT);
digitalWrite(gear2, HIGH);
pinMode(gear3, OUTPUT);
digitalWrite(gear3, HIGH);
pinMode(gear4, OUTPUT);
digitalWrite(gear4, HIGH);
pinMode(gear5, OUTPUT);
digitalWrite(gear5, HIGH);
pinMode(gear6, OUTPUT);
digitalWrite(gear6, HIGH);
pinMode(gearR, OUTPUT);
digitalWrite(gearR, HIGH);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, INPUT);
pinMode(7, INPUT);
pinMode(8, INPUT);
pinMode(9, INPUT);
Joystick.begin();
Serial.begin(115200);
}
void loop() {
if
(digitalRead(gear1) == 0)
{
Joystick.setButton(0, 1);
}
if (digitalRead(gear1) == 1)
{
Joystick.setButton(0, 0);
}
if
(digitalRead(gear2) == 0)
{
Joystick.setButton(1, 1);
}
if (digitalRead(gear2) == 1)
{
Joystick.setButton(1, 0);
}
if
(digitalRead(gear3) == 0)
{
Joystick.setButton(2, 1);
}
if (digitalRead(gear3) == 1)
{
Joystick.setButton(2, 0);
}
if
(digitalRead(gear4) == 0)
{
Joystick.setButton(3, 1);
}
if (digitalRead(gear4) == 1)
{
Joystick.setButton(3, 0);
}
if
(digitalRead(gear5) == 0)
{
Joystick.setButton(4, 1);
}
if (digitalRead(gear5) == 1)
{
Joystick.setButton(4, 0);
}
if
(digitalRead(gear6) == 0)
{
Joystick.setButton(5, 1);
}
if (digitalRead(gear6) == 1)
{
Joystick.setButton(5, 0);
}
if
(digitalRead(gearR) == 0)
{
Joystick.setButton(6, 1);
}
if (digitalRead(gearR) == 1)
{
Joystick.setButton(6, 0);
}
}