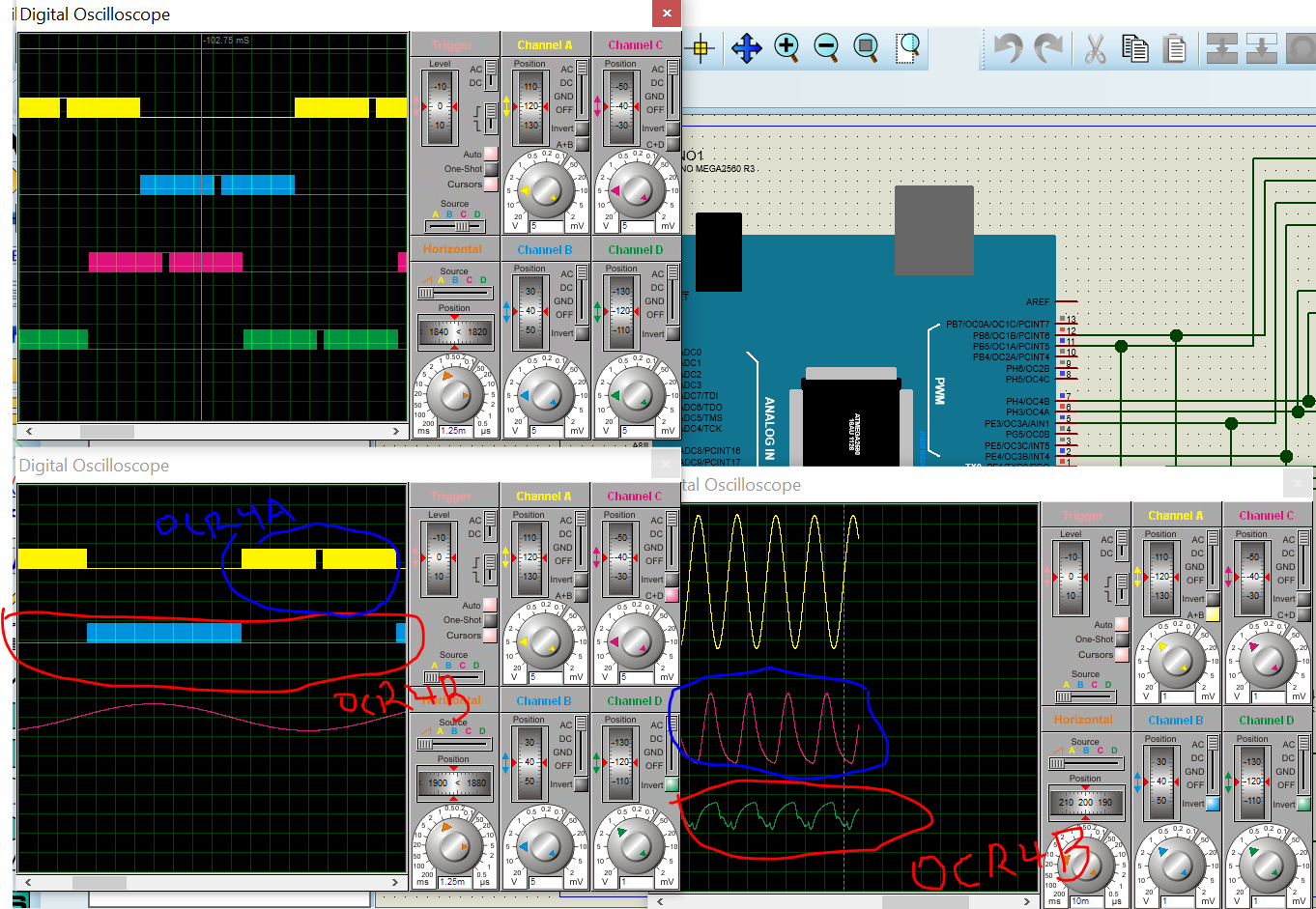
I have tried simulating the code at 40kHz, but when i simulate with Proteus. The OCR4B is not producing the same pulse pattern as with other OCRnA/B. I couldn't understand the observation.
I'm using Timer 1,3 & 4. Lookup table elements - 400.
#include <avr/io.h>
#include <avr/interrupt.h>
#define elements 400 //elements=(half of period of output wave)/(period of switching freq)=((1/2)*(1/50))/(1/50000)
#define switchingfreq 40000
int compare=0;
int m=0;
int i=0;
int j=0;
int k=0;
int phase1=0;
int phase2_1=0;
int phase2_2=0;
int phase3_1=0;
int phase3_2=0;
int sinPWM[elements];
double temp;
void setup(){
Serial.begin(9600);
compare = (16*1e6)/(2*switchingfreq);
/*Generate sine lookup table*/
for(m=0;m<elements;m++)
{
temp=sin(m*PI/(elements-1))*compare;
sinPWM[m]=(int)(temp+0.5);
}
cli(); //Stop interrupts
/*Register initilisation for Timer/Counter 1*/
TCCR1A=0; //Reset the value
TCCR1B=0; //Reset the value
TCCR1A=0b10100010; //Phase-correct pwm mode, TOP - ICRn
TCCR1B=0b00010001; //No prescaler
ICR1=compare;
/*Register initilisation for Timer/Counter 3*/
TCCR3A=0; //Reset the value
TCCR3B=0; //Reset the value
TCNT3=0; //Reset the value
TCCR3A=0b10100010; //Phase-correct pwm mode, TOP - ICRn
TCCR3B=0b00010001; //No prescaler
ICR3=compare;
/*Register initilisation for Timer/Counter 4*/
TCCR4A=0; //Reset the value
TCCR4B=0; //Reset the value
TCNT4=0; //Reset the value
TCCR4A=0b10100010; //Phase-correct pwm mode, TOP - ICRn
TCCR4B=0b00010001; //No prescaler
ICR4=compare;
TIMSK1 |=(1 << TOIE1); //Enable interrupts for OCR5A compare match
sei(); //Enable global interrupts
/*Pins setup*/
DDRB=0b01100000; //Set PB5 (OCR1A) and PB6 (OCR1B) as outputs; based on board pin mapping (could use pinMode to set input/output)
DDRE=0b00011000; //Set PE3 (OCR3A) and PE4 (OCR3B) as outputs
DDRH=0b00011000; //Set PH4 (OCR4A) and PH5 (OCR4B) as outputs
pinMode(8,OUTPUT);
}
ISR(TIMER1_OVF_vect){ //Interrupt when timer 1 overflows
if(i<elements && phase1==0)
{
OCR1A=sinPWM[i]; //Turns on positive of phase1 pulse; Change duty cycle
OCR1B=0;
}
if(i<elements && phase1==1)
{
OCR1A=0;
OCR1B=sinPWM[i];
}
if(i>=elements && phase1==0)
{
i=0;
phase1=1; //Enable OCR1B
}
if(i>=elements && phase1==1)
{
i=0;
phase1=0;
}
i++;
if(i==((2*elements)/3) || phase2_1==1)
{
phase2_1=1;
if(j<elements && phase2_2==0)
{
OCR3A=sinPWM[j]; //Turns on positive of phase1 pulse; Change duty cycle
OCR3B=0;
}
if(j<elements && phase2_2==1)
{
OCR3A=0;
OCR3B=sinPWM[j];
}
if(j>=elements && phase2_2==0)
{
j=0;
phase2_2=1; //Enable OCR1B
}
if(j>=elements && phase2_2==1)
{
j=0;
phase2_2=0;
}
j++;
}
if(j==((2*elements)/3) || phase3_1==1)
{
phase3_1=1;
if(k<elements && phase3_2==0)
{
OCR4A=sinPWM[k]; //Turns on positive of phase1 pulse; Change duty cycle
OCR4B=0;
}
if(k<elements && phase3_2==1)
{
OCR4A=0;
OCR4B=sinPWM[k];
}
if(k>=elements && phase3_2==0)
{
k=0;
phase3_2=1; //Enable OCR1B
}
if(k>=elements && phase3_2==1)
{
k=0;
phase3_2=0;
}
k++;
}
}
void loop() {
//nothing
}
Thank you.