Hello everyone. I am attempting to build an automated lego sorter. It will feature a conveyer driven by a stepper, using micro servos to sort, a TCS3200 and UNO.
I would like to initally start with sorting only 3 colors. Preferably Red, Green, Blue, and dump all other colors off the edge of the conveyer. I would like to change these as I need so I can sort other color bricks.
It is ok if it is not a 100% method, I need something to cut down hand sorting.
I found 2 codes that I would like to combine, but I need to also add something to tell the stepper to start and stop.
My basis initally was this project:
Sorting machine
Using this code:
#include <Servo.h>
Servo pickServo;
Servo dropServo;
#define S0 4
#define S1 5
#define S2 7
#define S3 6
#define sensorOut 8
int frequency = 0;
int color=0;
int detectColor() {
// activating red photodiodes to read
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
frequency = pulseIn(sensorOut, LOW);
int R = frequency;
Serial.print("Red = ");
Serial.print(frequency);//printing RED color frequency
Serial.print(" ");
delay(50);
// activating blue photodiodes to read
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
frequency = pulseIn(sensorOut, LOW);
int B = frequency;
Serial.print("Blue = ");
Serial.print(frequency);
Serial.println(" ");
// activating green photodiodes to read
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
// Reading the output frequency
frequency = pulseIn(sensorOut, LOW);
int G = frequency;
Serial.print("Green = ");
Serial.print(frequency);
Serial.print(" ");
delay(50);
delay(50);
//Readings are different for different setup
//change the readings according your project and readings detected
if(R<22 & R>20 & G<29 & G>27){
color = 1; // Red
Serial.print("Detected Color is = ");
Serial.println("RED");
}
if(G<25 & G>22 & B<22 &B>19){
color = 2; // Orange
Serial.println("Orange ");
}
if(R<21 & R>20 & G<28 & G>25){
color = 3; // Green
Serial.print("Detected Color is = ");
Serial.println("GREEN");
}
if(R<38 & R>24 & G<44 & G>30){
color = 4; // Yellow
Serial.print("Detected Color is = ");
Serial.println("YELLOW");
}
if (G<29 & G>27 & B<22 &B>19){
color = 5; // Blue
Serial.print("Detected Color is = ");
Serial.println("BLUE");
}
return color;
}
void setup() {
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(sensorOut, INPUT);
//frequency-scaling to 20% selected
digitalWrite(S0, LOW);
digitalWrite(S1, HIGH);
pickServo.attach(9);
dropServo.attach(10);
Serial.begin(9600);
}
void loop() {
//initial position of servo motor
pickServo.write(115);
delay(600);
for(int i = 115; i > 65; i--) {
pickServo.write(i);
delay(2);
}
delay(500);
//read color values by calling function. save the values for conclusion in variable
color = detectColor();
delay(1000);
switch (color) {
case 1:
dropServo.write(50);
break;
case 2:
dropServo.write(80);
break;
case 3:
dropServo.write(110);
break;
case 4:
dropServo.write(140);
break;
case 5:
dropServo.write(170);
break;
case 0:
break;
}
delay(500);
for(int i = 65; i > 29; i--) {
pickServo.write(i);
delay(2);
}
delay(300);
for(int i = 29; i < 115; i++) {
pickServo.write(i);
delay(2);
}
color=0;
}However, with following his tutorial I could not get the correct RGB outputs, so I tried this one:
RGB Sensor
```
/*********
Rui Santos
Complete project details at https://randomnerdtutorials.com
*********/
// TCS230 or TCS3200 pins wiring to Arduino
#define S0 4
#define S1 5
#define S2 6
#define S3 7
#define sensorOut 8
// Stores frequency read by the photodiodes
int redFrequency = 0;
int greenFrequency = 0;
int blueFrequency = 0;
// Stores the red. green and blue colors
int redColor = 0;
int greenColor = 0;
int blueColor = 0;
void setup() {
// Setting the outputs
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
// Setting the sensorOut as an input
pinMode(sensorOut, INPUT);
// Setting frequency scaling to 20%
digitalWrite(S0,HIGH);
digitalWrite(S1,LOW);
// Begins serial communication
Serial.begin(9600);
}
void loop() {
// Setting RED (R) filtered photodiodes to be read
digitalWrite(S2,LOW);
digitalWrite(S3,LOW);
// Reading the output frequency
redFrequency = pulseIn(sensorOut, LOW);
// Remaping the value of the RED (R) frequency from 0 to 255
// You must replace with your own values. Here's an example:
// redColor = map(redFrequency, 70, 120, 255,0);
redColor = map(redFrequency, XX, XX, 255,0);
// Printing the RED (R) value
Serial.print("R = ");
Serial.print(redColor);
delay(100);
// Setting GREEN (G) filtered photodiodes to be read
digitalWrite(S2,HIGH);
digitalWrite(S3,HIGH);
// Reading the output frequency
greenFrequency = pulseIn(sensorOut, LOW);
// Remaping the value of the GREEN (G) frequency from 0 to 255
// You must replace with your own values. Here's an example:
// greenColor = map(greenFrequency, 100, 199, 255, 0);
greenColor = map(greenFrequency, XX, XX, 255, 0);
// Printing the GREEN (G) value
Serial.print(" G = ");
Serial.print(greenColor);
delay(100);
// Setting BLUE (B) filtered photodiodes to be read
digitalWrite(S2,LOW);
digitalWrite(S3,HIGH);
// Reading the output frequency
blueFrequency = pulseIn(sensorOut, LOW);
// Remaping the value of the BLUE (B) frequency from 0 to 255
// You must replace with your own values. Here's an example:
// blueColor = map(blueFrequency, 38, 84, 255, 0);
blueColor = map(blueFrequency, XX, XX, 255, 0);
// Printing the BLUE (B) value
Serial.print(" B = ");
Serial.print(blueColor);
delay(100);
// Checks the current detected color and prints
// a message in the serial monitor
if(redColor > greenColor && redColor > blueColor){
Serial.println(" - RED detected!");
}
if(greenColor > redColor && greenColor > blueColor){
Serial.println(" - GREEN detected!");
}
if(blueColor > redColor && blueColor > greenColor){
Serial.println(" - BLUE detected!");
}
}I found that with my sensor:
Red 39, 226
Green 69, 286
Blue 27,97
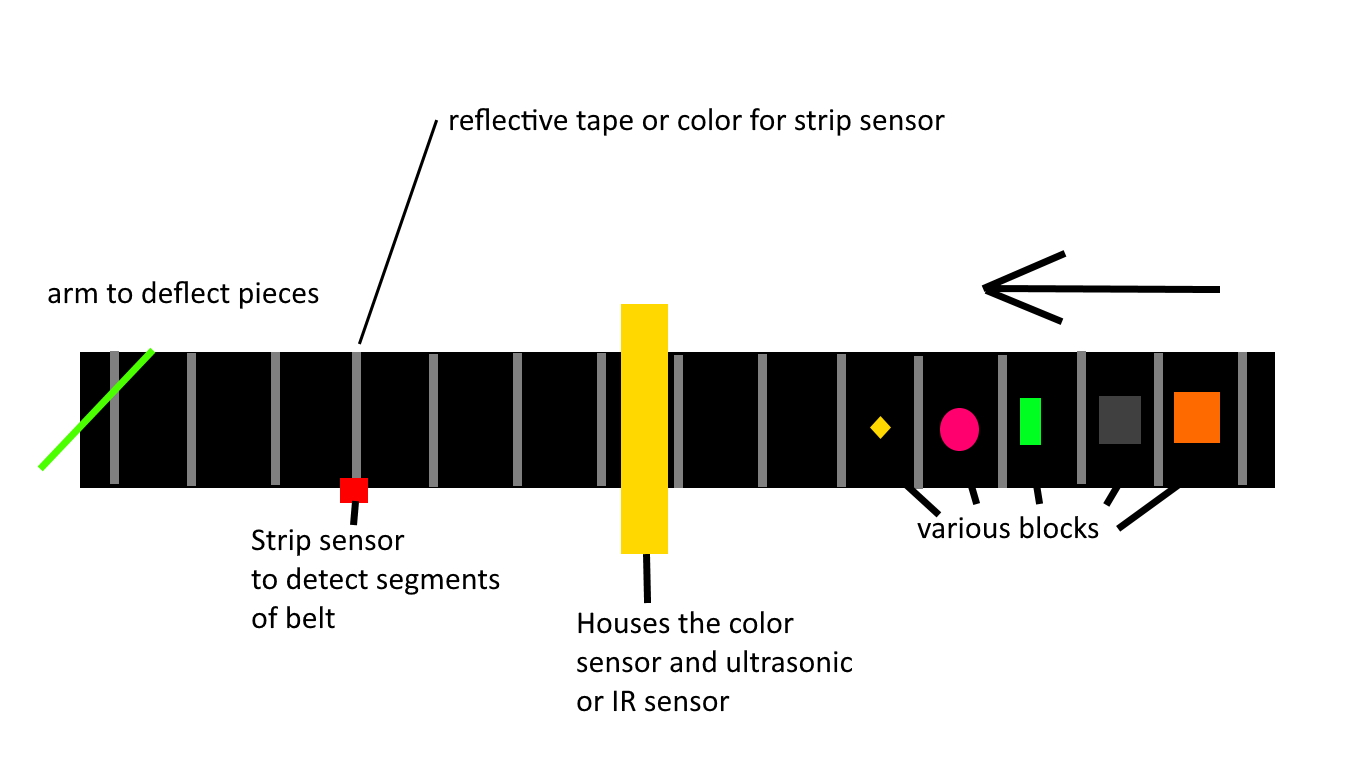
Again, I would like to pretty much merge these. I like the ability to change the 0-255 so I can tweak teh code as needed for the colors I am sorting. I am trying to make this thing as basic as I can. I have a very basic drawing of what I am trying to do:

This is the stepper tutorial I would like to use as well:
Thank you again for helping me. I am still a little new to this whole coding thing. I have only modified code for 3D printers.