Ciao a tutti.
Sono Marco, e vorrei avviare una discussione sull'arlgoritmo di controllo (pià che altro il suo perfezionamento) che governa il cosiddetto Altitude Hold per un velivolo radiocomandato di piccole dimensioni (qudricottero).
Ho letto l'avviso che sancisce che questa sezione ospita solo progetti finiti (non è il mio caso), o progetti che richiedano visibilità ed ampio riscontro (potrebbe essere il mio caso).
Non sto proprio partendo da zero, ho giò montato i sensori sul cottero, ardu compreso, cablaggio, l'ho giò programmato, e ho già lavorato sulla manipolazione dei dati misurati a bordo.
Per adesso provo ad apire con qusta domanda. Se gli amministratori lo permetteranno si continua la discussione altrimenti l'argomento verrò spostato (ho visto che non c'è una sezione droni o aereomodellismo: perchè non crearla? Sembra esssere una cosa di grande interesse).
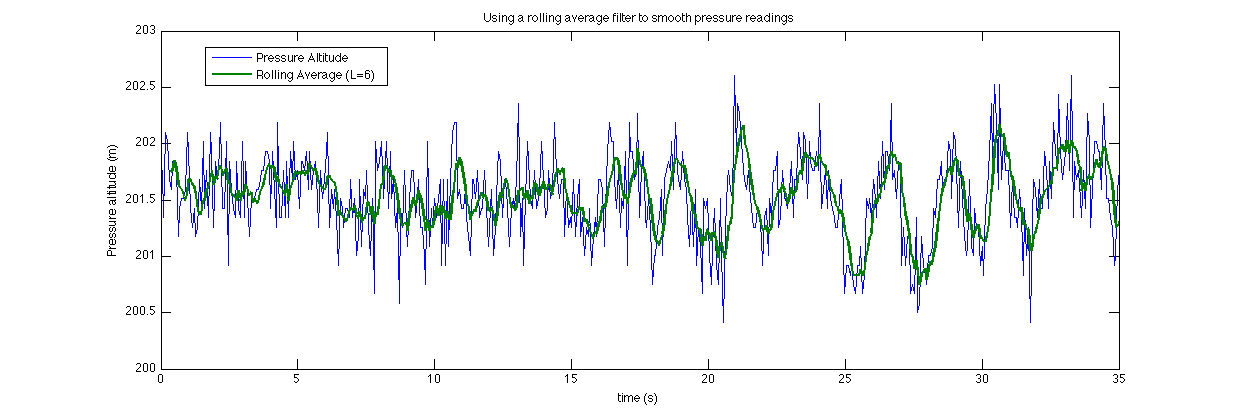
Ebbene la prima domanda riguarda le misure prese a bordo del cottero, usando il barometro. HO scartato il GPS che è troppo impreciso per la scala che interessa a me.
Il sensore informa il velivolo sulla sua presunta posizione. I primi 15 secodi del grafico che ho annesso, il sensore era fermo sul tavolo. Poi l'ho iniziato ad agitare su e giù, con escursione di circa un metro.
Analizzando i risultati posso dire che, in un volo reale, credo che mi causerebbe problemi (era fermo sul tavolo ma oscillava). QUalcuno può contraddirmi o dare la sua opinione?
Inoltre, per eliminare il rumore di misura, ho applicato un filtro a media mobile, con amnpiezza pari a 6 campionamenti.
Riducendo il numero della finestra non toglievo abbastanza rumore. Aumentandolo, il filtro era troppo lento e molto sfasato.
Se riuscirò, con l'aiuto del forum, a superare questo problema, c'è poi quello che riguarda l'algoritmo di controllo: sto usando un controllo retroattivo ad anello chiuso (PID). Ma ho ancora molti dubbi e non riesco a sormontare un problema che mi sembra banale. MA sono sempre i problemi apparentemente banali quelli che mi fanno inciampare.
In allegato la immagine menzionata sopra. ciao e grazie.
un saluto,
Marco