So my first non-trivial Arduino project (not trivial to me at least) is making a stabilizing platform.
I'm using a MPU6050 to read the angles and I'm using a filter and I'm really happy with the data I'm getting from the MPU.
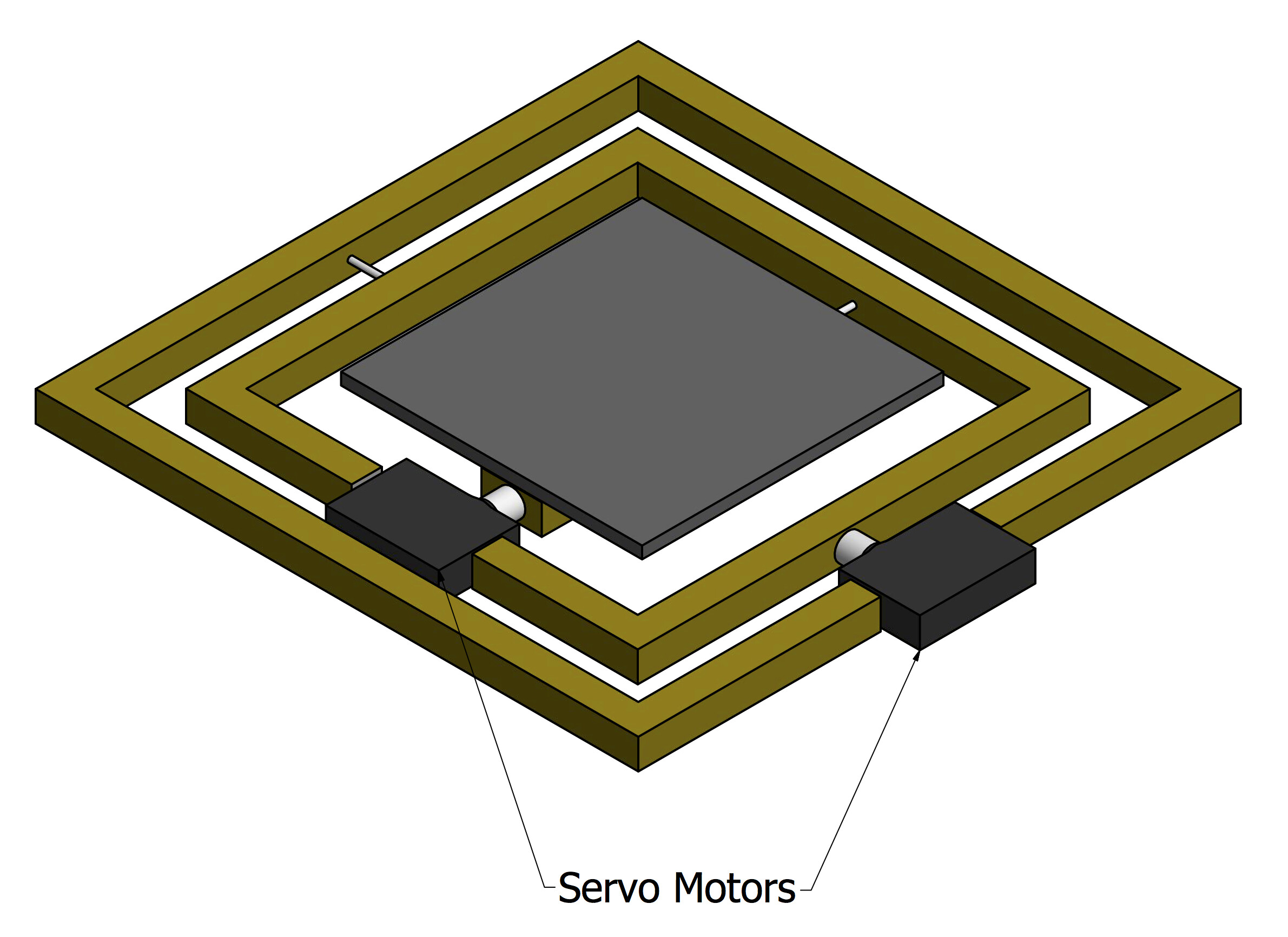
The platform use can be seen in the attachment, the MPU will be positioned on the center platform.
My problem is what is the correct way to write to the Servos from collected data.
I'm only starting with the Pitch angle(x-axis) and I have mapped the values from the MPU to match the servos.
My problem is when I write to the Servo the reference frame of the MPU changes relative to the servos position and I'm not really sure how to compensate for that.
any help Would be appreciated