I have found several topics here but I am not experienced enough to follow along with the solutions.
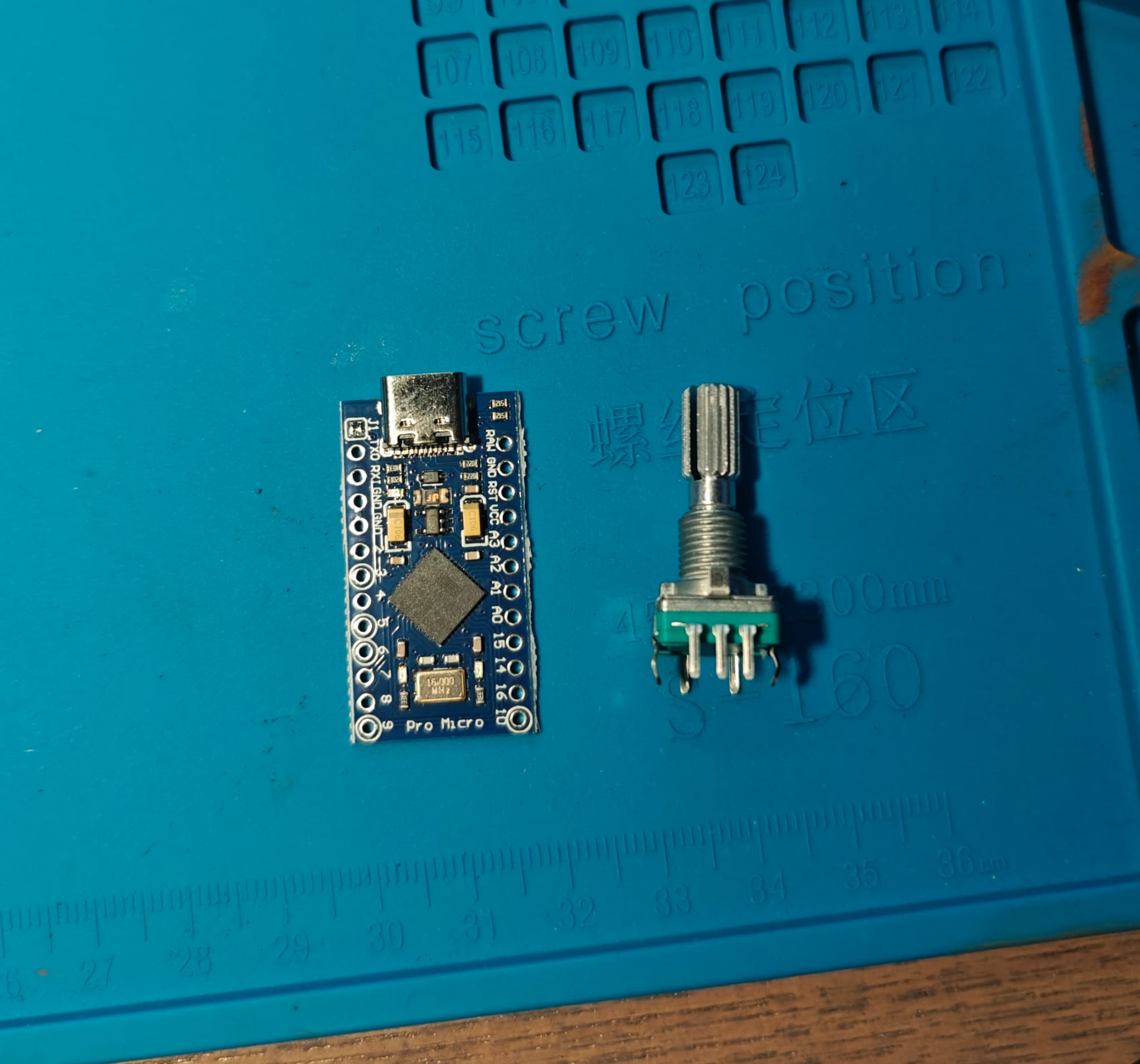
I have micro pro and rotary encoders. I have a flight sim with a helicopter collective that is in desperate need of a throttle addition. I think this is the way to do it. I also have an ESP32 if that is a better option.
Yes it has a push button switch that I do not require for this particular project.
Honestly, I need help with quite a bit. I'd love to know the best way to get this rotary encoder wired to the micro ie where to terminate. And then what the best code would be.
It will be a twist throttle meaning clockwise would increase the helicopters throttle. And anti-clockwise would decrease. Or visa versa
I have used QEI decoder library using interrupt on change to detect changes in the A and B levels on a number of microcontrollers ESP32, Leonardo, ETC - tested with rotary encoders similar to the one in photo in post 1
should work on a pro micro
I have those same rotary encoders as well, I didn't get them to work properly until added 10K pullup resistors to the pins (INPUT_PULLUP from the board turned out to be to weak) and 100nF de-bounce capacitors (Pin to GND)
Then i created this test sketch to run on a Pro-mini using pin change interrupts. Now since it is using direct port manipulation it won't be working on a micro without modification. Actually i probably shouldn't post it but it may be helpful. I will set 1 encoder up with the pullups and the capacitors later and get it to work with the micro. The Pin Change interrupts seem rather different than on a Pro-mini though, so bear with me. You can also do it using the normal interrupt pins on a Micro, that may be easier to accomplish.
The basic idea is that you connect either the A or the B pin to an interrupt pin, and connect the other to a non-interrupt pin, Set the interrupt to 'FALLING' and read the status of the non-interrupt pin, which will tell you the direction the encoder was turned. For this type of encoder that is exactly what you want, but without the 10K pullups & the capacitors, all bets are off.
(example code, far from perfect for you purpose sorry about that.)
#define Y_LED 7
#define ENC1_X 16
#define ENC1_A 3
#define ENC1_B 4
#define ENC2_A 5
#define ENC2_B 6
volatile int8_t dir = 0;
volatile int8_t val = 0;
volatile bool pressed = false;
void setup() {
pinMode(Y_LED, OUTPUT);
pinMode(ENC1_A, INPUT);
pinMode(ENC1_B, INPUT);
pinMode(ENC1_X, INPUT);
Serial.begin(115200);
Serial.println("PCINT test started.");
PCICR |= B110;
PCMSK2 |= 1 << 3;
PCMSK1 |= 1 << 4; //B00010000; pin A4 PC4
}
void loop() {
static int8_t oldVal = 0;
BlinkLed();
if (oldVal != val) {
Serial.print("New Value = ");
Serial.println(val, DEC);
oldVal = val;
}
if (pressed) {
Serial.println("Button pressed !");
pressed = false;
}
}
void BlinkLed() {
if ((millis() / 500) % 2) {
digitalWrite(Y_LED, HIGH);
}
else {
digitalWrite(Y_LED, LOW);
}
}
ISR (PCINT1_vect) { // for multiple buttons we need to keep track of which button pressed
static uint32_t lastFired = millis(); // or we can't use press combinations
if (!pressed) {
uint8_t in = PINC;
in = in & 16;
if ((!in) && (millis() - lastFired > 50)) {
pressed = true;
}
}
lastFired = millis();
}
ISR (PCINT2_vect) {
uint8_t in = PIND;
uint8_t in1 = in & 24;
if (in1 == 16) {
val++;
}
else if (in1 == 0) {
val--;
}
}
Just as an update, dug up an unused micro, grabbed an encoder like the one shown by the OP. (EC11) Added 100nF capacitors between the A / B & GND and added 10K pullups to A & B pins.
Put this on a breadboard, which of course makes it a tad unstable, but when i hold the encoder while i turn it, it's OK. Will make a small testing version later that is soldered.
Wrote this
#define A_PIN 2
#define B_PIN 15
volatile int8_t counter = 0;
void setup() {
Serial.begin(115200);
while (!Serial); // for native usb boards
Serial.println("Encoder on a Micro");
pinMode(A_PIN, INPUT);
pinMode(B_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(A_PIN), Count, FALLING);
}
void loop() {
static int8_t oldCounter = 0;
int8_t loopCounter = counter;
if (oldCounter != loopCounter) {
Serial.print("New Value : ");
Serial.println(loopCounter, DEC);
oldCounter = loopCounter;
}
delay(1);
}
void Count() {
if (digitalRead(B_PIN)) {
counter++;
}
else {
counter--;
}
}
This uses an 8 bit variable as a counter, so interrupts can remain enabled while reading / copying it.
Only 1 interrupt pin per encoder is used, so with just the external interrupt pins you could use 5 encoders.