sterretje:
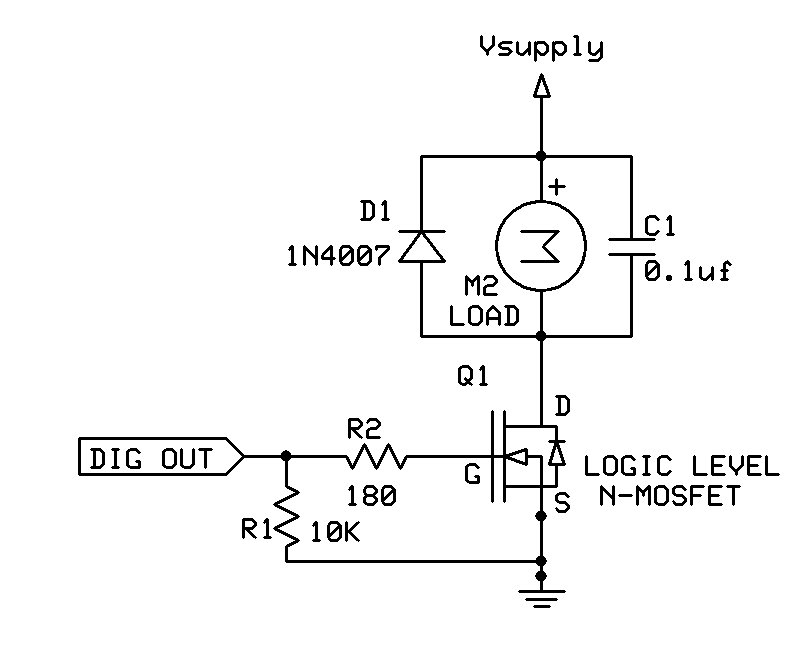
You're missing R2 which, as jremington states, is NOT optional.
Yup, I missed that. Here's a crude calculation:
[b]T[/b] = Qg/Ig
where:
[b]Ig[/b] - is the peak Gate current [it's not linear, so this is an estimate][b]Qg[/b]- the Total charge on the Gate [from the datasheet][b]t[/b] - the approximate switching time
So, if we drive the gate with 20mA [the recommended max current from an Arduino pin], and call it a 10mA average current, since the current will not remain at 20mA, but will ramp down [or up, depending on whether the thing is switching ON, or OFF], we get the following switching time:
[b]T[/b] = 66nC/10mA = [b]6.6µS[/b]
It's probably a bit faster than that, because the gate doesn't have to get all the way to 5V, before the transistor "turns on" [and at what point the transistor can be considered "ON" has much to do with how much current is needed to get that motor started. For instance, according to Figure 1, on the Vishay datasheet, in the Typical case, the gate needs to be at 2.75V for 10A to flow in the channel, and if, say, that motor demands 20A, then the Gate needs to be at 3V, etc.
So, to set this current, use the following math:
[b]Rg[/b] = Vout/Iout = 5V/20mA = [b]250Ω[/b]
But, for such short periods of time, we can probably get away with pressing that Arduino output to deliver a little more current, say 30mA, which is 10mA short of the Absolute Maximum ['cuz were, potentially, dealing with a lot of current, here, so it would be good to get that transistor switching as fast as possible] -- and, again, lets take the estimated average current of 15mA:
[b]T[/b] = 66nC/15mA = [b]4.4µS[/b]
[b]Rg[/b] = Vout/Iout = 5V/30mA = [b]167Ω[/b]
But, once again, this is some kindergarten math, so only useful, maybe, for ballpark calculations, and non-critical applications, like occasionally turning a motor on and off.
Also, 4.4µS [and even 6.6µS] seems pretty fast, but if that 16V motor does demand the kind of current the IRLZ44 is designed for, then even 4.4µS might be long enough for damage to occur. After all, the datasheet indicated this transistor is meant to be driven with a rise/fall time in the hundreds of nS range, making our measly 4.4µS rather a long time!
The datasheet indicates a Rise Time of 230nS. Let's get an estimate of how much current ti would take to get that kind of switching speed. And lets assume we need at least 4V on the Gate to get the channel open enough to accommodate start up current or 40A on that motor [currently a mystery quantity, as the OP has failed to divulge].
4V/5V = [b]0.8[/b] or
** **80%** **
of the full Arduino Vout.
[b]Ig[/b] = Qg/t * 80% * 2 = 66nC/230nS * 0.8 * 2 = [b]460mA[/b]
Not something an Arduino output is capable of!