OK, I rebuilt the Motor Test Station.
First I turned the base board, there were too many holes.
And to avoid the base board from moving as in the end of last video, I used nails in the corners to fixate the base board on the desk (click on the photos to see more details):
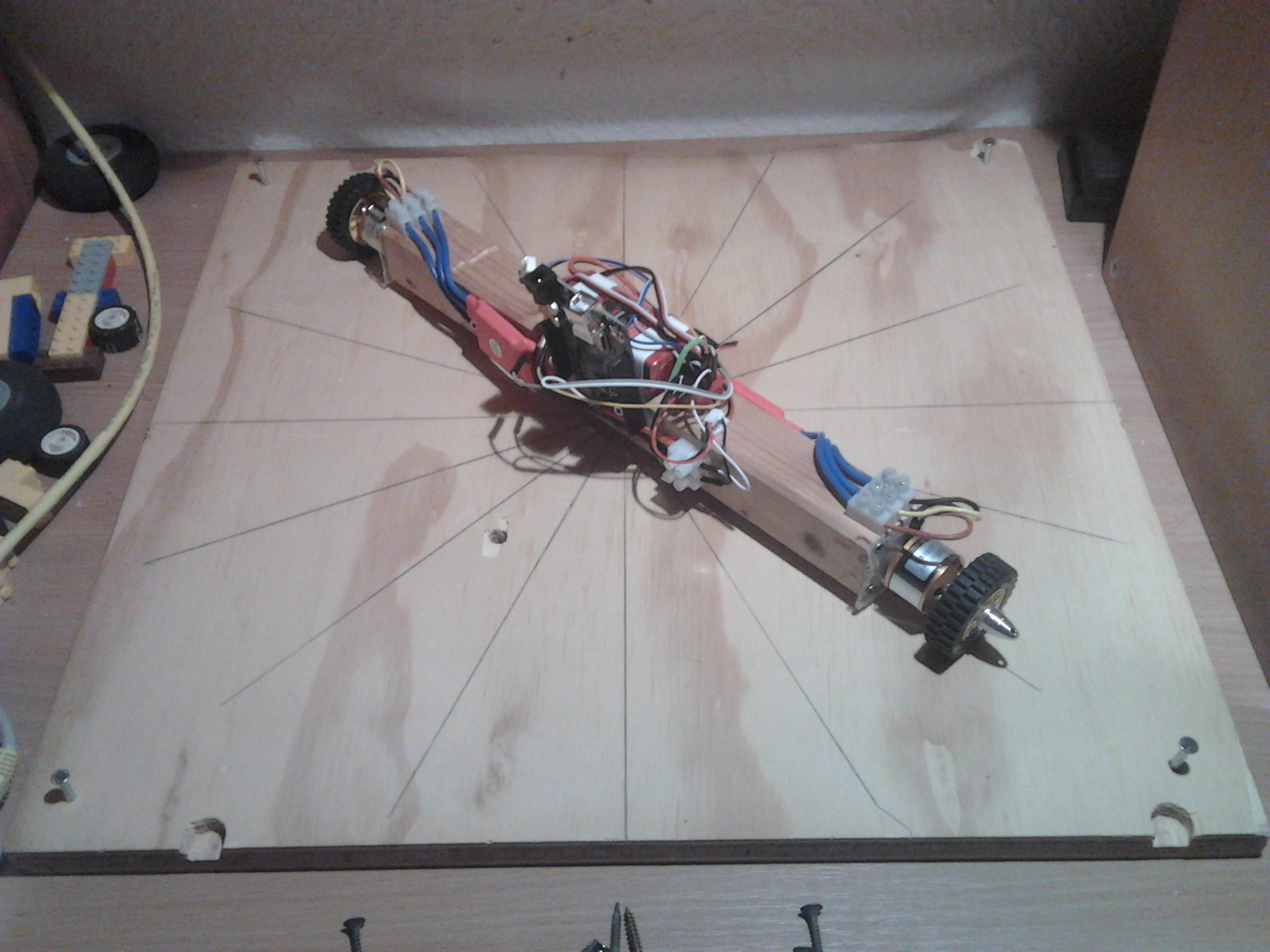
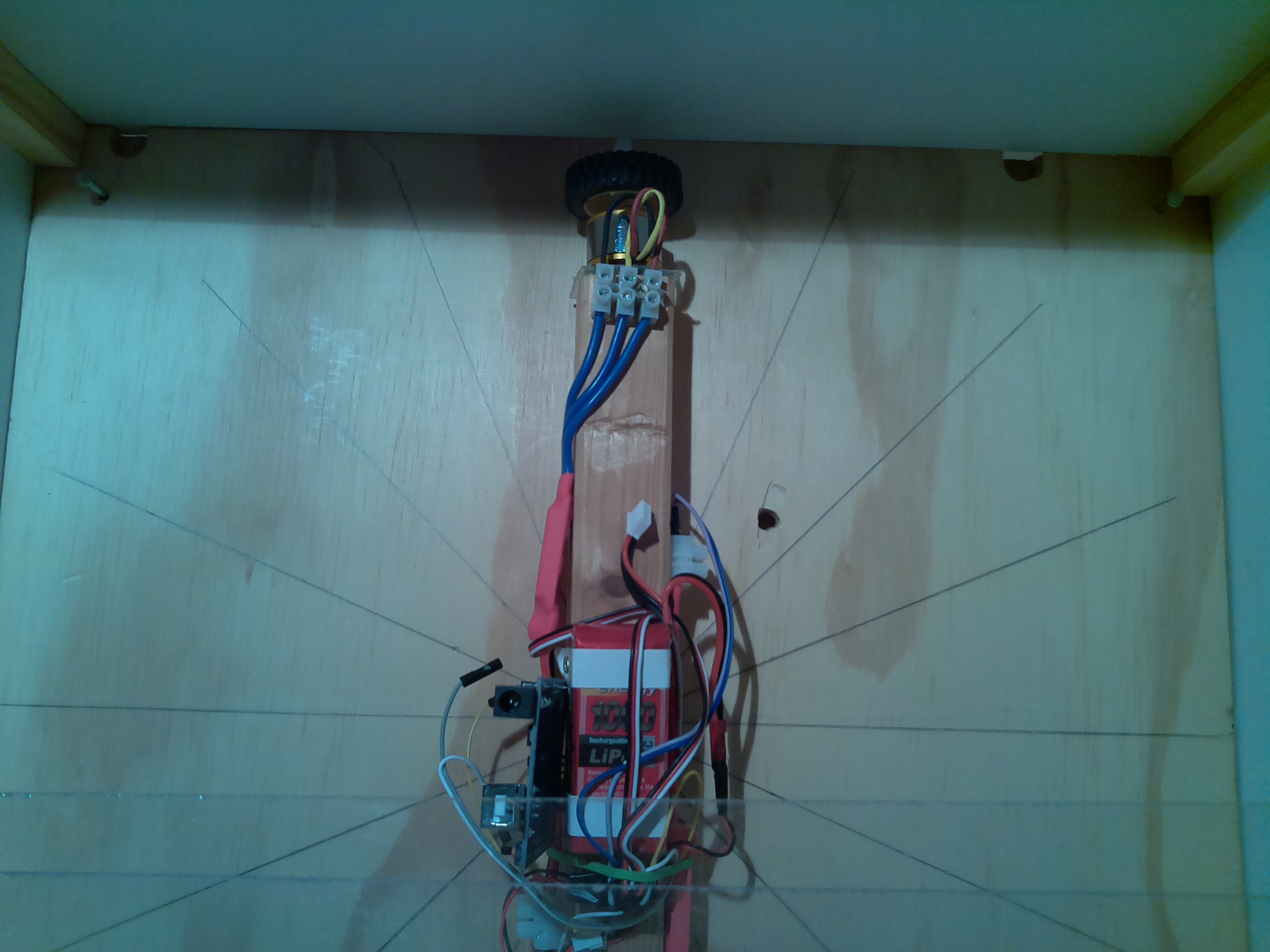
Here you can see the replacement for the safety glas surrounding.
I hope that the4 fixing brackets will avoid bullet plus motor to go throug the wall from now on:

This is top view from Raspberry camera, which normally takes the 90fps videos:
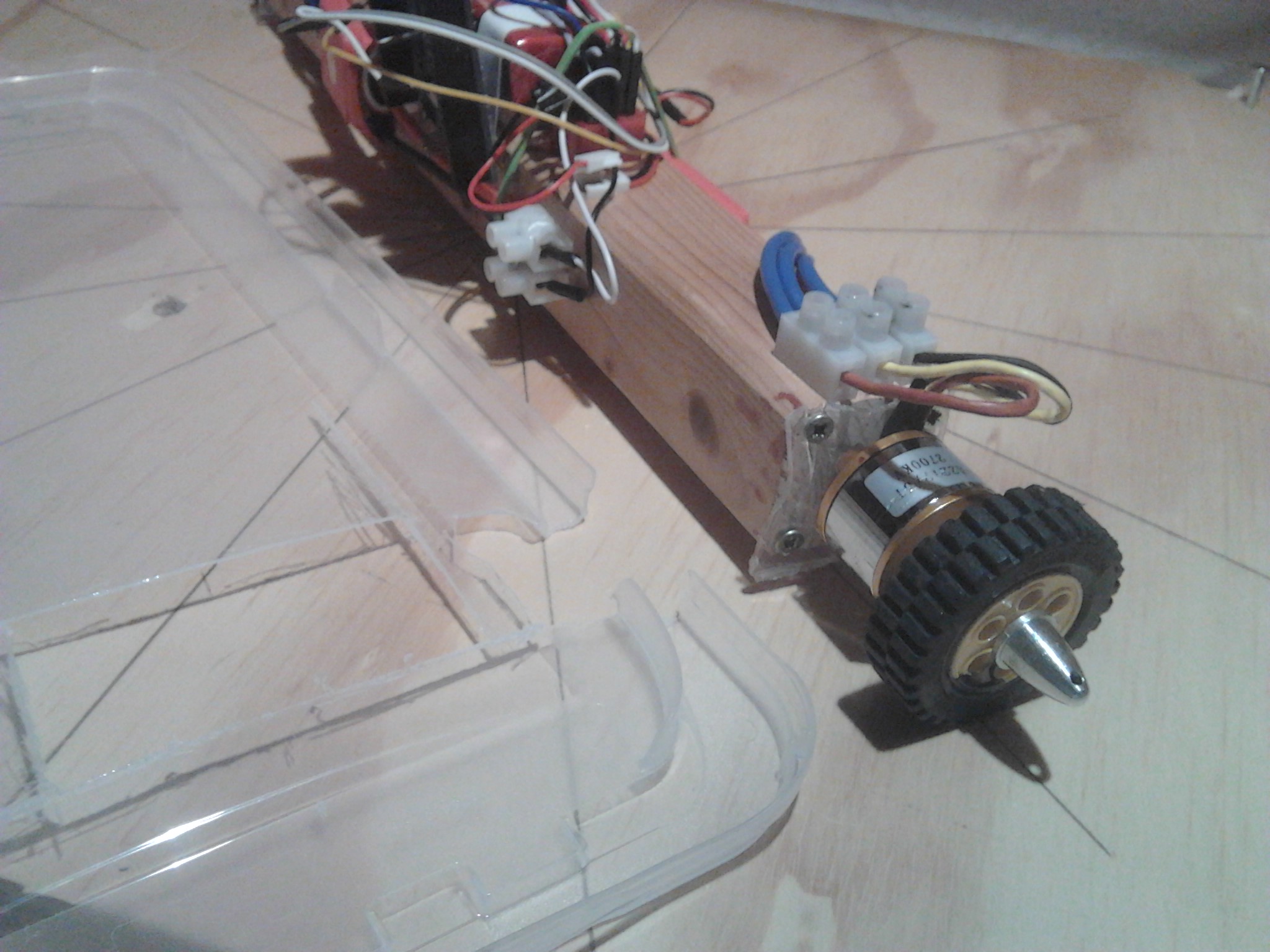
Finally I replaced the wooden motor mountings with plastic.
I hope that it has same behavior as wood wrt vibrations, but is more stable than wood:
Test runs would be too loud now at night here, will do tomorrow,
Hermann.