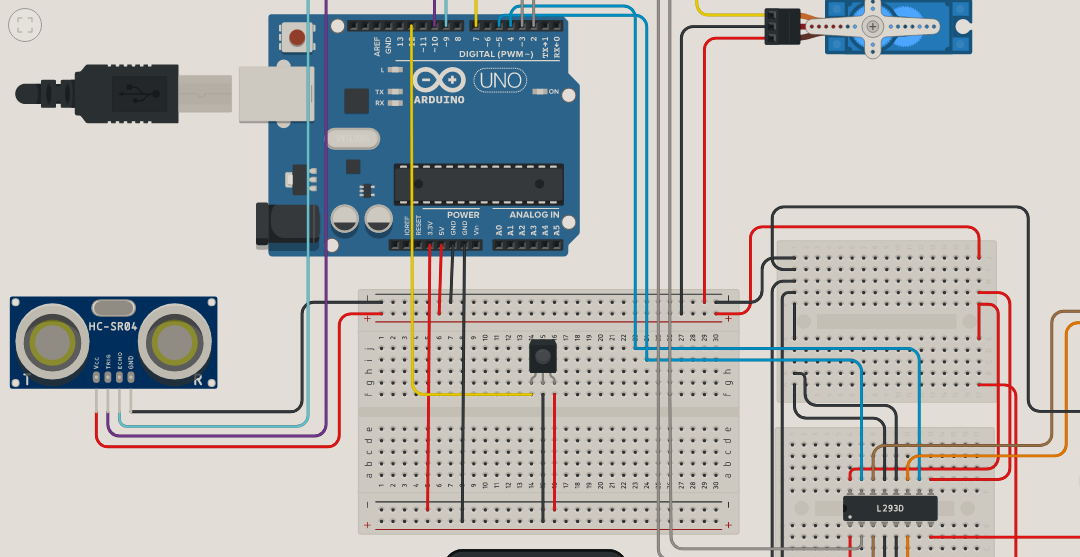
So, I tried making an Arduino Project(Controlling Motors by Remote and Ultrasonic Sensor would activate Servo when the distance is less than 50cm)
I am trying to build a project, A remote controlled car, which will pick up objects when it encouters an object within 50cm. The remote controlled car works fine, but, to pick up objects i am trying to make it work with ultrasonic sensor, but to no avail
First when I just build the circuit for Remote Controled Motors the circuit worked fine, but after adding an Ultrasonic Sensor and Servo the circuit is not working)
This is the code without Ultrasonic and Servo:
#define Next_button 16615543 // code received from next button
#define Prev_button 16619623 // code received from previous button
#define left_button 16591063 // code received from left button
#define right_button 16607383 // code received from right button
#define Stop_button 16580863 // code received from stop button
int receiver_pin = 12; //output pin of IR receiver to pin 2 of arduino
//initializing the pins for leds
int left_motor1 = 2; //pin 6 of arduino to pin 7 of l293d
int left_motor2 = 3; //pin 7 of arduino to pin 2 of l293d
int right_motor1 =4; //pin 5 of arduino to pin 10 of l293d
int right_motor2 = 5; //pin 4 of arduino to pin 15 of l293d
IRrecv receiver(receiver_pin); //Arduino will take output of IR receiver from pin 2
decode_results output;
void setup() {
Serial.begin(9600);
receiver.enableIRIn(); // Start to take the output from IR receiver
//initializing all the pins where we have connected the led's as output pins
pinMode(left_motor1, OUTPUT);
pinMode(left_motor2, OUTPUT);
pinMode(right_motor1, OUTPUT);
pinMode(right_motor2, OUTPUT);
}
void loop() {
if (receiver.decode(&output)) {
unsigned int value = output.value;
switch(value) {
case Next_button:
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
break;
case Prev_button:
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,HIGH);
break;
case left_button:
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,HIGH);
break;
case right_button:
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
break;
case Stop_button:
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
break;
}
receiver.resume();
}
}

This is the code with Ultrasonic and Servo:
#include <IRremote.h> //including the remote library
#include <Servo.h>
#define Next_button 16615543 // code received from next button
#define Prev_button 16619623 // code received from previous button
#define left_button 16591063 // code received from left button
#define right_button 16607383 // code received from right button
#define Stop_button 16580863 // code received from stop button
#define trigPin 11
#define echoPin 10
int receiver_pin = 12; //output pin of IR receiver to pin 2 of arduino
//initializing the pins for leds
int left_motor1 = 2; //pin 6 of arduino to pin 7 of l293d
int left_motor2 = 3; //pin 7 of arduino to pin 2 of l293d
int right_motor1 =4; //pin 5 of arduino to pin 10 of l293d
int right_motor2 = 5; //pin 4 of arduino to pin 15 of l293d
Servo servo;
IRrecv receiver(receiver_pin); //Arduino will take output of IR receiver from pin 2
decode_results output;
void setup() {
Serial.begin(9600);
receiver.enableIRIn(); // Start to take the output from IR receiver
//initializing all the pins where we have connected the led's as output pins
pinMode(left_motor1, OUTPUT);
pinMode(left_motor2, OUTPUT);
pinMode(right_motor1, OUTPUT);
pinMode(right_motor2, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo.attach(8);
}
void loop() {
if (receiver.decode(&output)) {
unsigned int value = output.value;
switch(value) {
case Next_button:
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
break;
case Prev_button:
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,HIGH);
break;
case left_button:
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,HIGH);
break;
case right_button:
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
break;
case Stop_button:
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
break;
}
receiver.resume();
}
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
if (distance < 50) {
Serial.println("the distance is less than 5");
servo.write(90);
}
else {
servo.write(0);
}
if (distance > 60 || distance <= 0) {
Serial.println("The distance is more than 60");
}
else {
Serial.print(distance);
Serial.println(" cm");
}
delay(500);
}