Hello, I need help again. I am using a IRF3205 motor driver with a arduino uno. I wanted to test the driver first so i connected it to a 12v motor. (planning to use a 350w 36v motor x 2 pcs in future)
When i plug the brushed motor directly to the leads of 3s lipo battery balanced connectors it started turning.
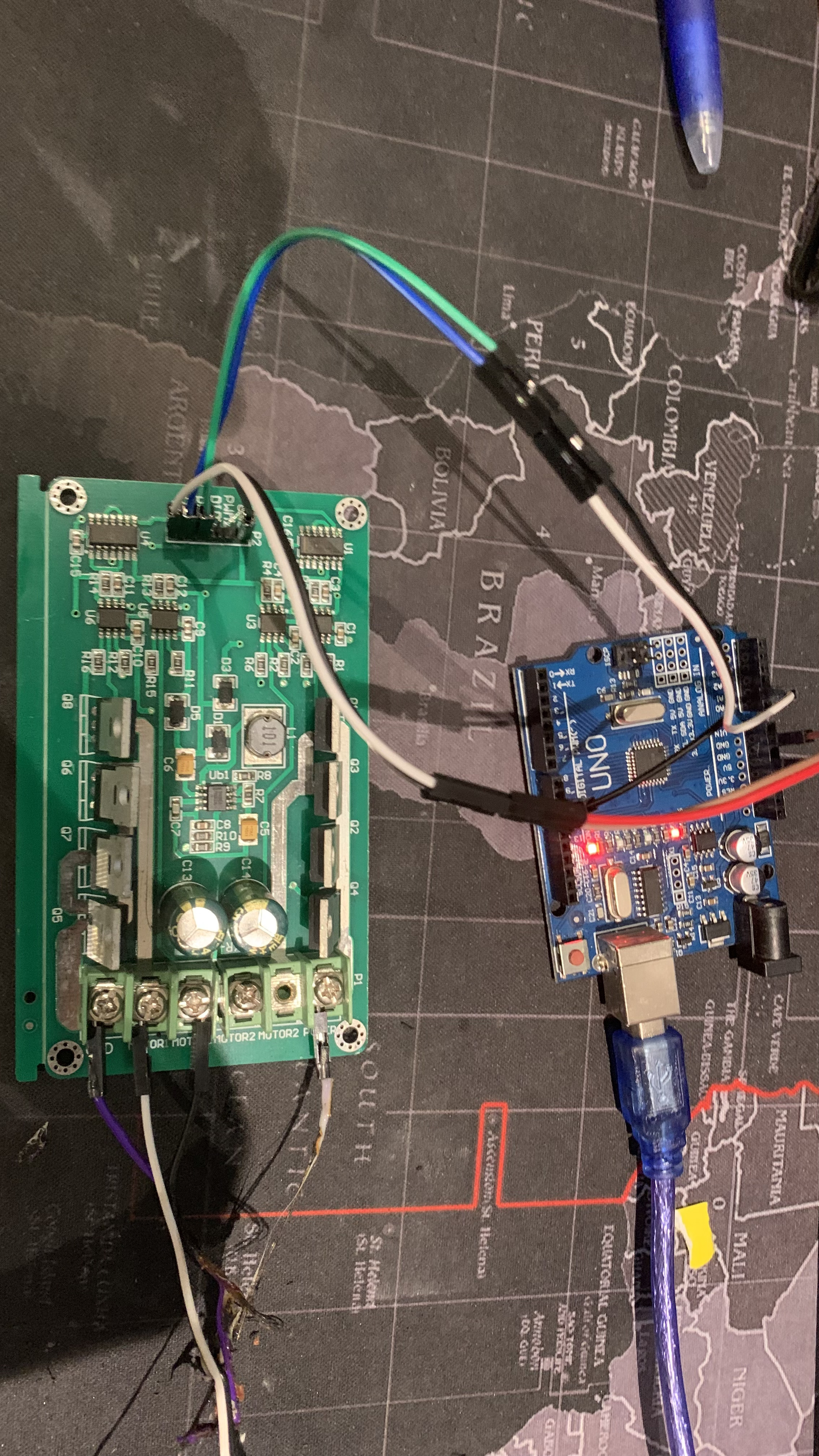
I then plugged the motor into the motor driver,
5v from arduino uno to driver
Ground to ground
PWM1 to D10
DIR1 to A1
I followed another forum with this same motor driver.
However, after uploading the code also from the forum, I plug connector going to the 12v balance point on the lipo battery to the motor driver and the jumper wires immediately caught on fire.
Did I get a faulty motor driver? Is the jumper cables to thin to handle the current? (I thought it is enough since when plugged directly without motor driver it spins fine and wires were not hot.)
// connect motor controller pins to Arduino digital pins
// motor one
int pwm1 = 10;
int dir1 = A1;
void setup()
{
// set all the motor control pins to outputs
pinMode(pwm1, OUTPUT);
pinMode(dir1, OUTPUT);
}
void demoOne()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(dir1, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(pwm1, 100);
delay(2000);
// now change motor directions
digitalWrite(dir1, LOW);
delay(2000);
// now turn off motors
digitalWrite(pwm1, LOW);
}
const int pwm1 = 10;
const int dir1 = A1;
void setup() {
// set all the motor control pins to outputs
pinMode(pwm1, OUTPUT);
pinMode(dir1, OUTPUT);
digitalWrite(dir1, HIGH);
}
void loop() {
for (int i = 0; i < 256; i += 5) {
analogWrite(pwm1, i);
delay(1000);
}
for (int i = 255; i < 0; i += 5) {
analogWrite(pwm1, i);
delay(1000);
}
}
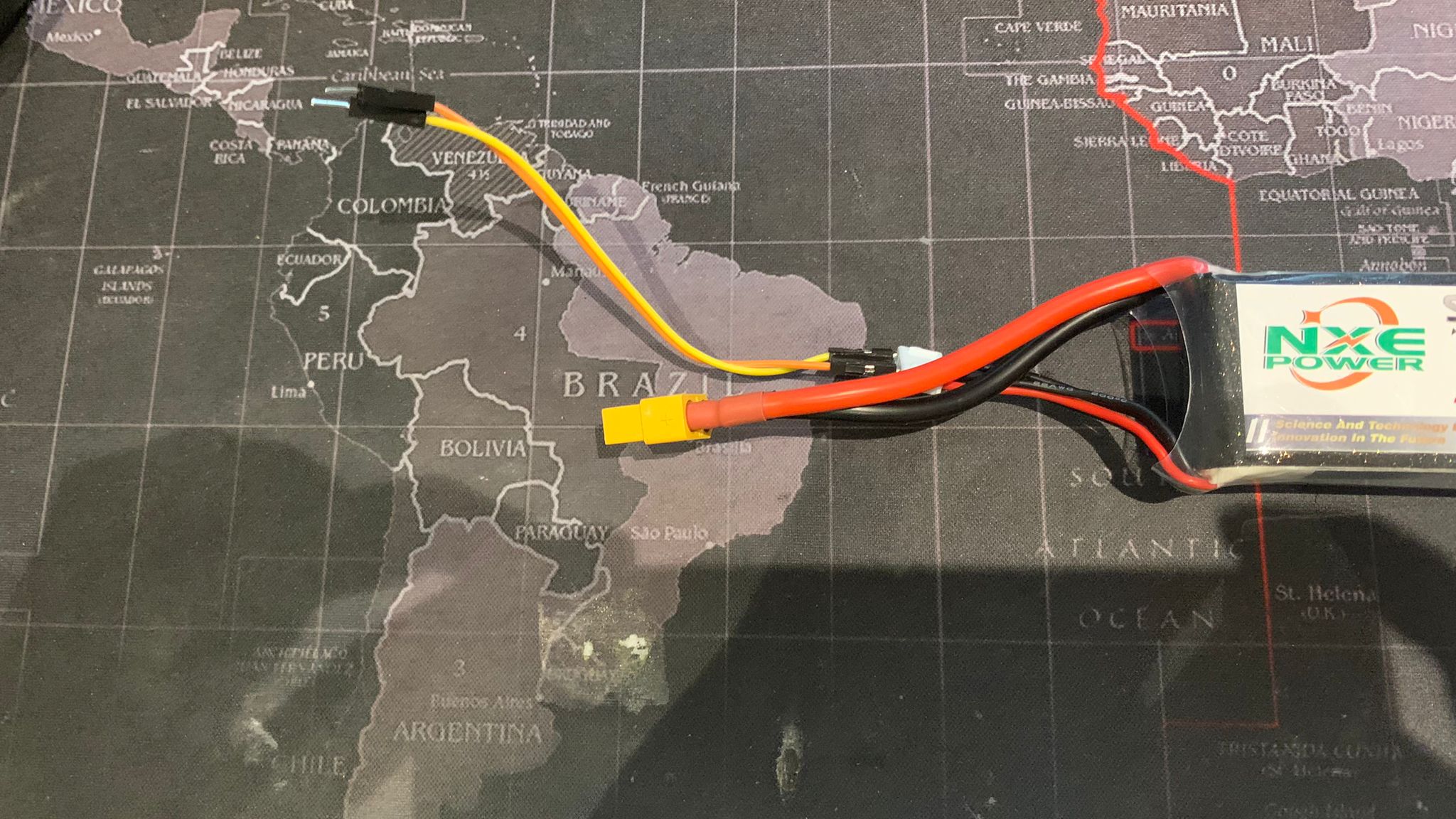
First, with dangerously powerful batteries, you should def use RED and BLACK jumper wires.
And are you tapping the balance connector properly? the picture looks like you only taking one cell (3.7 volts nominal).
Lastly, those crummy Dupont jumpers shouldn't be expected to connect well and deliver much current.
Better: Get the right connector to mate with the battery, I can't tell but looks like XT30 or XT60. Start using real wire of an appropriate gauge to get real current to where it is needed.
And be careful. Even a temporary short on that battery will bring a kind of excitement you don't need.