Hi all,
I have a Seeeduino XIAO. It speaks 3.3V TTL, as does the TF-Luna, so no TTL coverter is required, which is nice.
I have installed Bud Reyerson's TFMini Plus library, and am attempting to run his example code. I am using UART communications, with software serial on ports 9 and 10.
Here is my code. It is exactly the example, except I put in my pins 9 and 10.
/* File Name: TFMP_example.ino
* Developer: Bud Ryerson
* Inception: 29JAN2019
* Last work: 10SEP2021
* Description: Arduino sketch to test the Benewake TFMini Plus
* time-of-flight Lidar ranging sensor using the TFMPlus Library.
* Default settings for the TFMini Plus are a 115200 serial baud rate
* and a 100Hz measurement frame rate. The device will begin returning
* measurement data right away:
* Distance in centimeters,
* Signal strength in arbitrary units,
* and an encoded number for Temperature in degrees centigrade.
* Use the 'sendCommand()' to send commands and return a status code.
* Commands are selected from the library's list of defined commands.
* Parameters can be entered directly (115200, 250, etc) but for
* safety, they should be chosen from the library's defined lists.
*/
#include <TFMPlus.h> // Include TFMini Plus Library v1.5.0
TFMPlus tfmP; // Create a TFMini Plus object
#include "printf.h" // Modified to support Intel based Arduino
// devices such as the Galileo. Download from:
// https://github.com/spaniakos/AES/blob/master/printf.h
// The Software Serial library is an alternative for devices that
// have only one hardware serial port. Delete the comment slashes
// on lines 37 and 38 to invoke the library, and be sure to choose
// the correct RX and TX pins: pins 10 and 11 in this example. Then
// in the 'setup' section, change the name of the hardware 'Serial2'
// port to match the name of your software serial port, such as:
// 'mySerial.begin(115200); etc.
#include <SoftwareSerial.h>
SoftwareSerial mySerial( 9, 10);
void setup()
{
Serial.begin( 115200); // Intialize terminal serial port
delay(20); // Give port time to initalize
printf_begin(); // Initialize printf.
printf("\r\nTFMPlus Library Example - 10SEP2021\r\n"); // say 'hello'
mySerial.begin( 115200); // Initialize TFMPLus device serial port.
delay(20); // Give port time to initalize
tfmP.begin( &mySerial); // Initialize device library object and...
// pass device serial port to the object.
// Send some example commands to the TFMini-Plus
// - - Perform a system reset - - - - - - - - - - -
printf( "Soft reset: ");
if( tfmP.sendCommand( SOFT_RESET, 0))
{
printf( "passed.\r\n");
}
else tfmP.printReply();
delay(500); // added to allow the System Rest enough time to complete
// - - Display the firmware version - - - - - - - - -
printf( "Firmware version: ");
if( tfmP.sendCommand( GET_FIRMWARE_VERSION, 0))
{
printf( "%1u.", tfmP.version[ 0]); // print three single numbers
printf( "%1u.", tfmP.version[ 1]); // each separated by a dot
printf( "%1u\r\n", tfmP.version[ 2]);
}
else tfmP.printReply();
// - - Set the data frame-rate to 20Hz - - - - - - - -
printf( "Data-Frame rate: ");
if( tfmP.sendCommand( SET_FRAME_RATE, FRAME_20))
{
printf( "%2uHz.\r\n", FRAME_20);
}
else tfmP.printReply();
// - - - - - - - - - - - - - - - - - - - - - - - -
/* // - - - - - - - - - - - - - - - - - - - - - - - -
// The next two commands may be used to switch the device
// into I2C mode. This sketch will no longer receive UART
// (serial) data. The 'TFMPI2C_example' sketch in the
// TFMPI2C Library can be used to switch the device back
// to UART mode.
// Don't forget to switch the cables, too.
// - - - - - - - - - - - - - - - - - - - - - - - -
printf( "Set I2C Mode: ");
if( tfmP.sendCommand( SET_I2C_MODE, 0))
{
printf( "mode set.\r\n");
}
else tfmP.printReply();
printf( "Save settings: ");
if( tfmP.sendCommand( SAVE_SETTINGS, 0))
{
printf( "saved.\r\n");
}
else tfmP.printReply();
// - - - - - - - - - - - - - - - - - - - - - - - -
*/
delay(500); // And wait for half a second.
}
// Initialize variables
int16_t tfDist = 0; // Distance to object in centimeters
int16_t tfFlux = 0; // Strength or quality of return signal
int16_t tfTemp = 0; // Internal temperature of Lidar sensor chip
// Use the 'getData' function to pass back device data.
void loop()
{
delay(50); // Loop delay to match the 20Hz data frame rate
if( tfmP.getData( tfDist, tfFlux, tfTemp)) // Get data from the device.
{
printf( "Dist:%04icm ", tfDist); // display distance,
printf( "Flux:%05i ", tfFlux); // display signal strength/quality,
printf( "Temp:%2i%s", tfTemp, "C"); // display temperature,
printf( "\r\n"); // end-of-line.
}
else // If the command fails...
{
tfmP.printFrame(); // display the error and HEX dataa
}
}Here is my device:

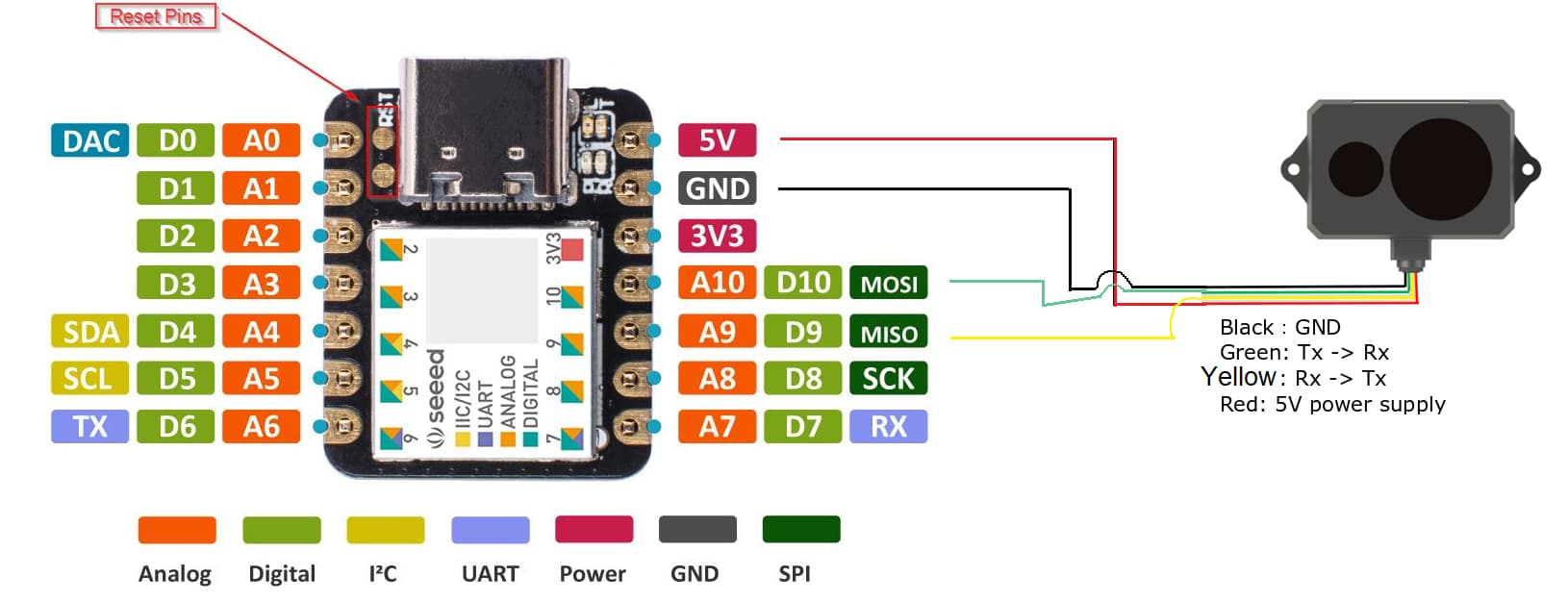
Here is the pinout of the Seeeduino XIAO:

Here is the pinout of the TF-Luna:

When I run the code, this is the output:
20:12:21.532 -> Status: HEADER
20:12:21.532 -> Data: 59 AD 93 80 AE 86 6A A1 FE
20:12:22.557 -> Status: HEADER
20:12:22.557 -> Data: 59 AD 93 80 AF 86 6B 42 FE
20:12:23.614 -> Status: HEADER
20:12:23.614 -> Data: FE 59 AD 93 80 C5 50 25 E1
20:12:24.666 -> Status: HEADER
20:12:24.666 -> Data: B1 86 6B A1 FF 59 AD 93 80
20:12:25.721 -> Status: HEADER
20:12:25.721 -> Data: FF 59 AD 93 80 58 23 2D E4
20:12:26.763 -> Status: HEADER
20:12:26.763 -> Data: EA 59 AD 93 80 B1 86 6B A1
I tried switching pins 9 and 10 in the code and then I get:
20:38:19.311 -> Status: HEADER
20:38:19.311 -> Data: 00 00 00 00 00 00 00 00 00
20:38:20.388 -> Status: HEADER
20:38:20.388 -> Data: 00 00 00 00 00 00 00 00 00
20:38:21.412 -> Status: HEADER
20:38:21.412 -> Data: 00 00 00 00 00 00 00 00 00
20:38:22.479 -> Status: HEADER
20:38:22.479 -> Data: 00 00 00 00 00 00 00 00 00
Can anyone help me talk to the TF-Luna?
Thanks.