I've Tried Multiwii and an opensource code with both firmware flashed on Arduino. It doesn't receive any transmitter signals hence there is no motor spinning.
Both code are as follows:
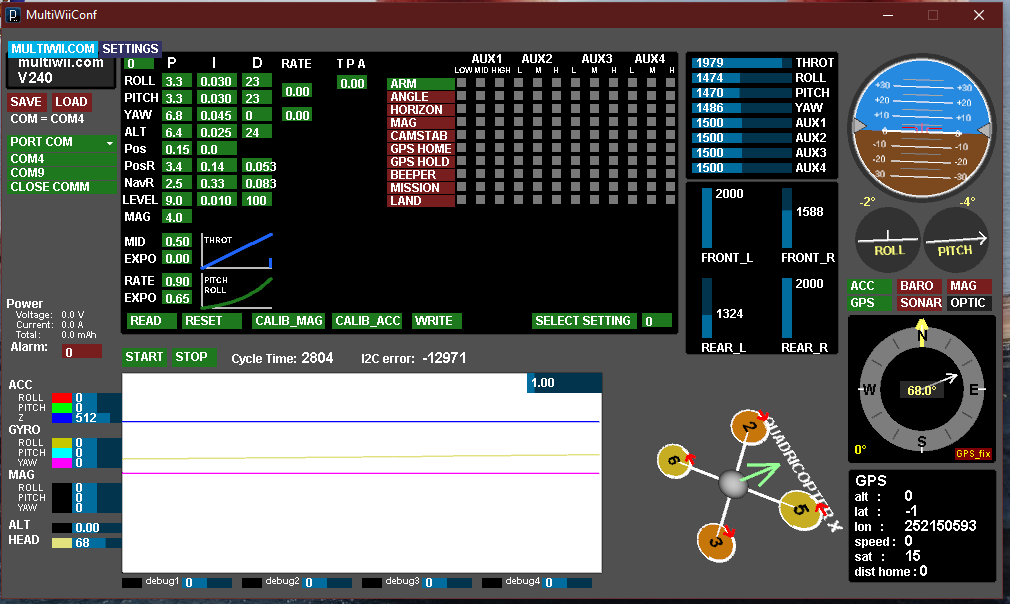
Multiwii
OpenSource Code
I've Also Tested the RC Reciever and Transmitter with this piece of code:
double channel[4];
void setup() {
// put your setup code here, to run once:
pinMode(3,INPUT);
pinMode(4,INPUT);
pinMode(5,INPUT);
pinMode(6,INPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
channel[0] = pulseIn(3,HIGH);
channel[1] = pulseIn(4,HIGH);
channel[2] = pulseIn(5,HIGH);
channel[3] = pulseIn(6,HIGH);
Serial.print(channel[0]);
Serial.print(" , ");
Serial.print(channel[1]);
Serial.print(" , ");
Serial.print(channel[2]);
Serial.print(" , ");
Serial.print(channel[3]);
Serial.println(" ");
}
My motors are calibrated with my fs-i6 before calibration Arduino was able to read the signals with the opensource code but not with multiwii.
I want to know what can I do to make Arduino recognize my transmitter signals and arm the motors?
I'm unable to post the code here because the limit is 9000 characters can I post it on paste bin and post here in case if someone wants to look at those codes?
It's hard to be sure but the white ones look like they should rotate clockwise (looking towards the motor with the motor behind the propeller) - the straight side is usually the leading edge. I can't say about the red ones as the picture does not show them as clearly.
Holding a strip of paper so the end is above or below the rotating propeller should be a simple test of airflow direction - just don't let the propeller hit your hand as it could cause a nasty injury.
Robin2:
Holding a strip of paper so the end is above or below the rotating propeller should be a simple test of airflow direction - just don't let the propeller hit your hand as it could cause a nasty injury.
I've adjusted the propellers got two of them wrong!
but now only right side of the drone is lifting up I tried to play with Trims on my FS-i6 it allowed me to generate thrust for three motors now!
but the motor on right is not generating enough thrust to lift off the ground!
here are my readings on multiwiiconf on full throttle
can you please guide me a lil bit about what I'm doing wrong?