Hi all,
I want to get the displacement information from a laser displacement sensor which is connected to an Arduino Mega Board through a ,RS485 to TTL module.

This is the RS485 to TTL module that I will be using. and the laser sensor is the XAORI LB -A100N-R4
XAORI Product Instruction Manual LB series.pdf (2.9 MB)
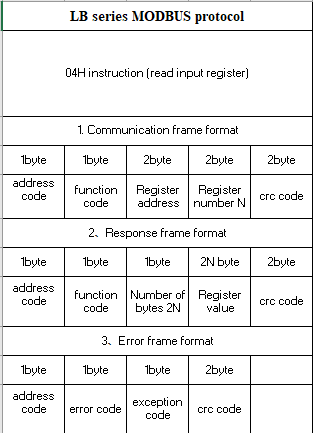
. I have documentation about the sensor's MODBUS protocol but I am unclear on how to utilize it with the libraries available as they cater towards another rs485 to ttl module that has the pins DI DE RE RO .
Can I use the Rx/Tx pins available on my ttl module with existing libraries such as Modbus Master.
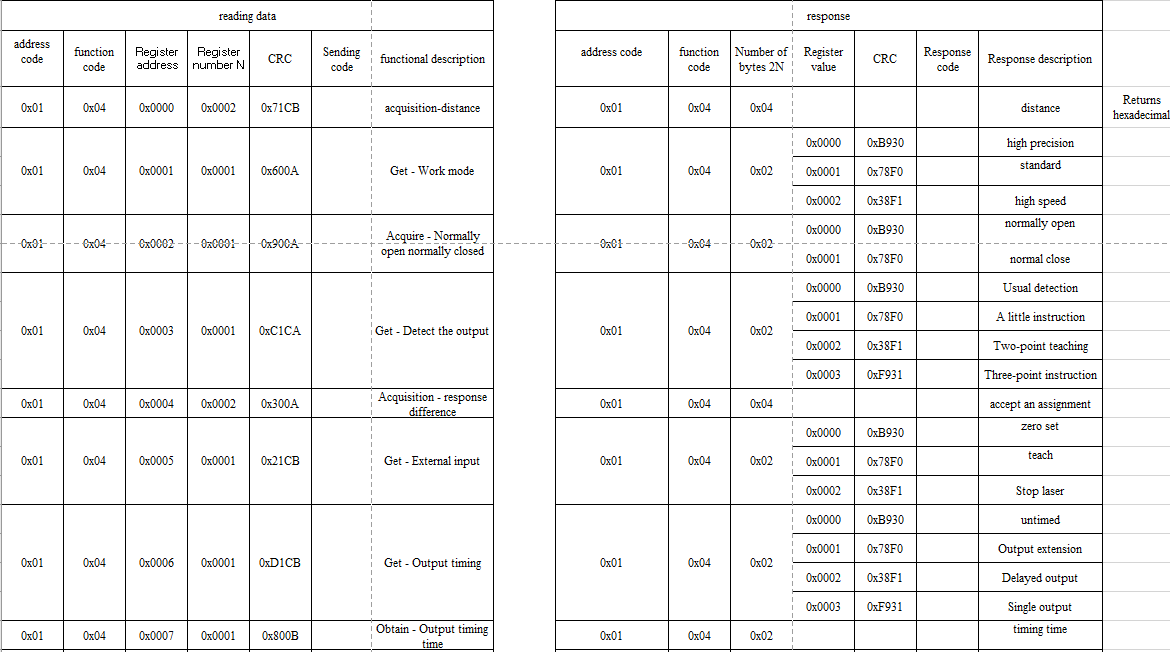
How do I access the sensor data using the given documentation about addresses and function codes.
Any coding that I can refer to either create my own library or to read the data directly from an industrial sensor with an RS485 is appreciated.
Mods I do not know if this is a cross-post to my previous question or not.
Please do tell me what other information I should provide. I am currently trying to understand the examples in the SensorModbusMaster library.
/*****************************************************************************
GetValues.ino
This example writes a setting value to a holding register, reads it to confirm
the value has changed, and then reads several data values from holding registers.
The register numbers in this example happen to be for an S::CAN oxy::lyser.
*****************************************************************************/
// ---------------------------------------------------------------------------
// Include the base required libraries
// ---------------------------------------------------------------------------
#include <Arduino.h>
#include <SensorModbusMaster.h>
// ---------------------------------------------------------------------------
// Set up the sensor specific information
// ie, pin locations, addresses, calibrations and related settings
// ---------------------------------------------------------------------------
// Define the sensor's modbus address
byte modbusAddress = 0x01; // The sensor's modbus address, or SlaveID
long modbusBaudRate = 38400; // The baud rate the sensor uses
// Define pin number variables
const int sensorPwrPin = 10; // The pin sending power to the sensor
const int adapterPwrPin = 22; // The pin sending power to the RS485 adapter
const int DEREPin = 7; // The pin controlling Recieve Enable and Driver Enable
// on the RS485 adapter, if applicable (else, -1)
// Setting HIGH enables the driver (arduino) to send text
// Setting LOW enables the receiver (sensor) to send text
// Construct software serial object for Modbus
#if defined(ARDUINO_AVR_UNO)
// The Uno only has 1 hardware serial port, which is dedicated to comunication with the computer
// If using an Uno, you will be restricted to using AltSofSerial or SoftwareSerial
#include <SoftwareSerial.h>
const int SSRxPin = 10; // Recieve pin for software serial (Rx on RS485 adapter)
const int SSTxPin = 11; // Send pin for software serial (Tx on RS485 adapter)
SoftwareSerial modbusSerial(SSRxPin, SSTxPin);
#else
// This is just a assigning another name to the same port, for convienence
// Unless it is unavailable, always prefer hardware serial.
HardwareSerial* modbusSerial = &Serial1;
#endif
// Construct the modbus instance
modbusMaster modbus;
// ---------------------------------------------------------------------------
// Main setup function
// ---------------------------------------------------------------------------
void setup()
{
// Set various pins as needed
if (DEREPin >= 0)
{
pinMode(DEREPin, OUTPUT);
}
if (sensorPwrPin >= 0)
{
pinMode(sensorPwrPin, OUTPUT);
digitalWrite(sensorPwrPin, HIGH);
}
if (adapterPwrPin >= 0)
{
pinMode(adapterPwrPin, OUTPUT);
digitalWrite(adapterPwrPin, HIGH);
}
// Turn on the "main" serial port for debugging via USB Serial Monitor
Serial.begin(57600);
// Turn on your modbus serial port
#if defined(ARDUINO_AVR_UNO)
modbusSerial.begin(modbusBaudRate);
// NOTE: Software serial only supports 8N1
#else
Serial1.begin(modbusBaudRate, SERIAL_8O1);
// ^^ use this for 8 data bits - odd parity - 1 stop bit
// Serial1.begin(modbusBaudRate, SERIAL_8E1);
// ^^ use this for 8 data bits - even parity - 1 stop bit
// Serial1.begin(modbusBaudRate, SERIAL_8N2);
// ^^ use this for 8 data bits - no parity - 2 stop bits
// Serial1.begin(modbusBaudRate);
// ^^ use this for 8 data bits - no parity - 1 stop bits
// Despite being technically "non-compliant" with the modbus specifications
// 8N1 parity is very common.
#endif
// Turn on debugging, if desired
// modbus.setDebugStream(&Serial);
// Start the modbus instance
modbus.begin(modbusAddress, modbusSerial, DEREPin);
// Write to a holding register
// In this case, we are changing the output units of a dissolved oxygen sensor
Serial.println("Setting DO units to ppm");
modbus.int16ToRegister(0x01, 1, bigEndian);
// Verify that the register changed
// 0x03 = holding register
// only holding registers are writeable
int16_t doUnitMode = modbus.int16FromRegister(0x03, 0x01, bigEndian);
Serial.print("Current unit mode is ");
Serial.println(doUnitMode);
}
// ---------------------------------------------------------------------------
// Main setup function
// ---------------------------------------------------------------------------
void loop()
{
// Get data values from read-only input registers (0x04)
// Just for show, we will do the exact same thing 2 ways
// All values will be read as bigEndian
// Some variables to hold results
uint16_t deviceStatus = 0;
int16_t doPPM = 0;
uint16_t temperature = 0;
// Method 1:
// Get three values one at a time from 3 different registers.
// This code is easier to follow, but it requires more back-and-forth between
// the Arduino and the sensor so it is a little "slower".
deviceStatus = modbus.uint16FromRegister(0x04, 0x00, bigEndian);
doPPM = modbus.int16FromRegister(0x04, 0x01, bigEndian);
temperature = modbus.uint16FromRegister(0x04, 0x02, bigEndian);
// Print results
Serial.print("Device Status:");
Serial.println(deviceStatus);
Serial.print("Dissolved Oxygen in ppm:");
Serial.println(doPPM);
Serial.print("Temperature in °C:");
Serial.println(temperature);
Serial.println();
// Method 2:
// Read all three registers at once and parse the values from the response.
// This is faster, especially when getting many readings, but it's trickier to
// write and understand the code.
bool success = modbus.getRegisters(0x04, 0x00, 3);
// ^ This gets the values and stores them in an internal "frame" with the hex values of the response
if (success)
{
deviceStatus = modbus.uint16FromFrame(bigEndian, 3);
// ^ The first data value is at position 3 in the modbus response frame
// 0 = modbus address, 1 = modbus method, 2 = # registers returned, 3 = 1st value returned
doPPM = modbus.int16FromFrame(bigEndian, 5);
// ^ The next data value is at position 5 since each register occupies 2 places
temperature = modbus.uint16FromFrame(bigEndian, 7);
}
// Print results
Serial.print("Device Status:");
Serial.println(deviceStatus);
Serial.print("Dissolved Oxygen in ppm:");
Serial.println(doPPM);
Serial.print("Temperature in °C:");
Serial.println(temperature);
Serial.println();
}