Buenas tardes a todos, estoy creando mi primer post solicitando ayuda en esto e intentaré mantenerme al márgen de las normas del FORO.
COMPONENTES UTILIZADOS:
MEGA 2560.
Sensor Distancia JRT.
Problema:
Antes de comenzar a explicar el problema que tengo, quiero aclarar que soy primerizo en el tema de Arduino y estoy muy entusiasmado al tema, además de tener ya un proyecto el cuál me gustaría terminar a cualquier coste.
El propósito de utilizar este sensor es que obtendré un gran rango de lectura (100mts); antes de comenzar con estos sensores, realicé pruebas de lectura (Pensando que podría empezar por lo conocido y yá utilizado por otros desarrolladores) con los VL53L0X y logré mi cometido: PODER OBTENER DATOS DE PROXIMIDAD A TODO LO QUE SE LE PONGA ENFRENTE.
Una vez obtenidos esos datos y poder visualizarlos en MONITOR SERIE, logré hacer que, el sistema, basado en los datos obtenidos, pudiera encender tanto un LED, como también active una alerta sonora.
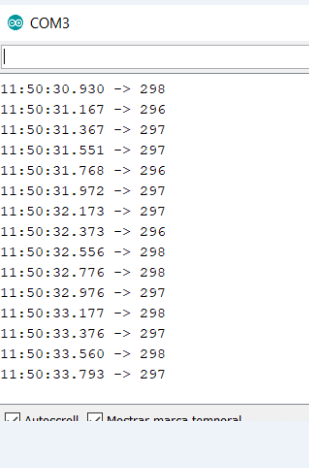
Una vez logrado todo esto, ahora intento realizar la misma acción con este sensor pero no logro obtener datos ni ningún tipo, y sin esos datos, no puedo seguir jaja.
Busqué en GOOGLE y demás, encontré HILOS en el foro como por ejemplo :Arduino TTL Oxygen Sensor Help - Programming Questions - Arduino Forum
que al parecer dan solución a este problema pero a mí no me funcionó.
Me gustaría saber que es lo que estoy haciendo mal.
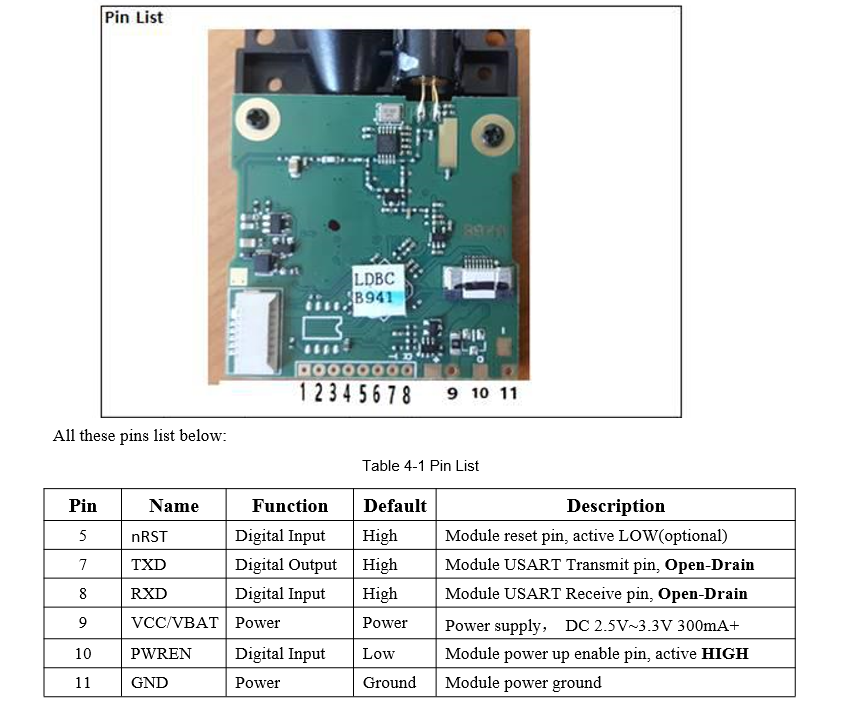
Adjunto pines que tengo en el sensor.
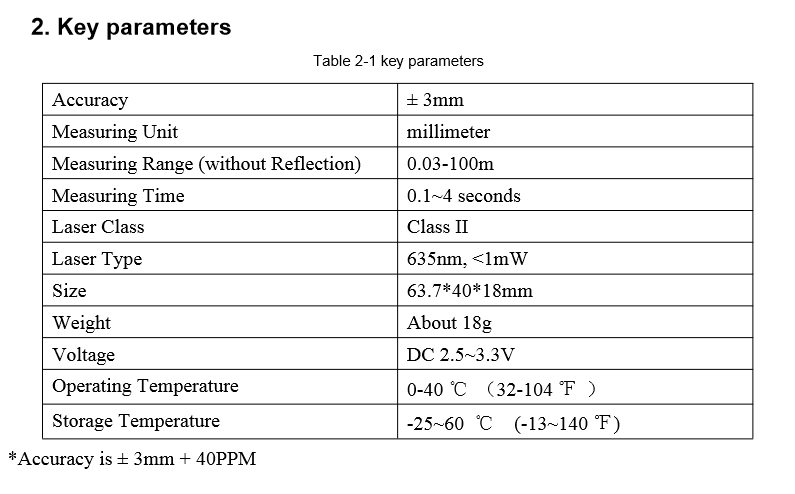
Adjunto Características.
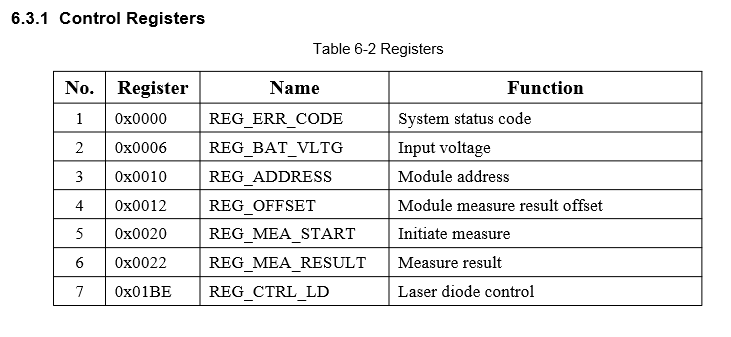
Adjunto Registros posibles del sensor.
Adjunto Parámetros posibles.
ADJUNTO CÓDIGO:
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10,11); //RX/TX
void setup()
{
Serial.begin(19200);
mySerial.begin(19200);
}
void loop()
{
if (mySerial.available())
{
Serial.write(mySerial.read());
}
}
ACLARO: ES TODO EL CÓDIGO QUE TENGO, POR AHORA YA QUE, HASTA QUE NO LOGRE OBTENER LOS DATOS DEL SENSOR, NO PODRÉ AVANZAR.
Este código prácticamente lo tomé de la respuesta NO.2 del Link que posteé en el problema.
Agradeceré muchísimo su apoyo muchach@s.
SI NECESITAN ALGÚN DATO EXTRA, SE LOS DOY AL TOQUE...
Si hay alguna opinión o algún error en base a mi post, por favor háganmelo saber, espero que me apoyen, así como también espero poder apoyarlos y eso conlleva a escribir más hilos en un futuro y me gustaría mejorar en mis redacciones.